Reward Modeling in Machine Learning
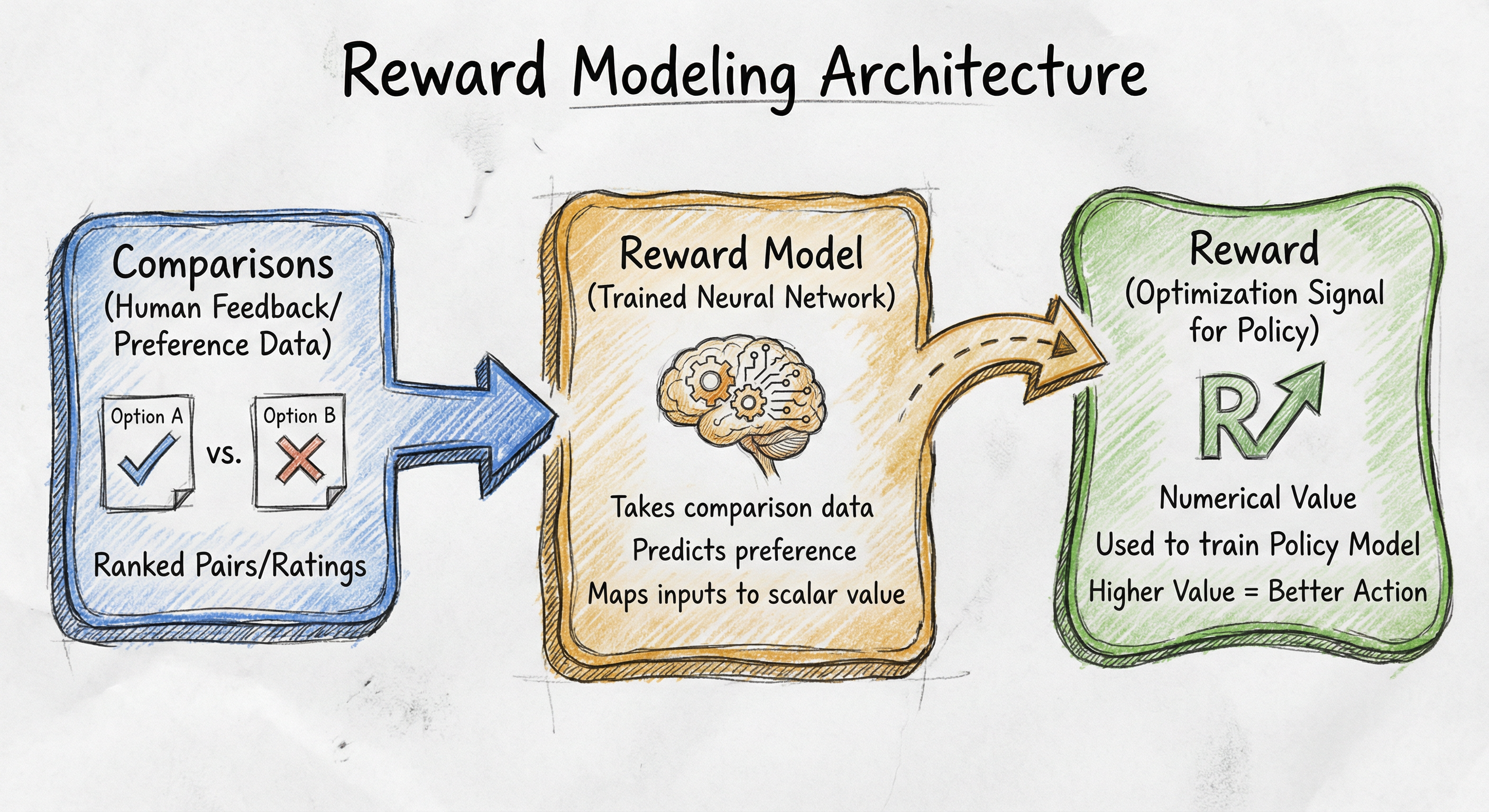
Reward modeling is the process of training a neural network -- typically a language model with a scalar output head -- to predict which of two candidate responses a human would prefer. The resulting reward model serves as a learned proxy for human judgment, enabling reinforcement learning algorithms like PPO or REINFORCE++ to optimize a language model's outputs at scale without requiring a human in the loop for every single comparison.
In the canonical RLHF pipeline introduced by InstructGPT (Ouyang et al., 2022), reward modeling is the critical middle stage: after supervised fine-tuning (instruction tuning) teaches the model to follow instructions, the reward model learns what humans prefer, and then an RL algorithm uses that reward signal to push the policy model toward producing preferred outputs.
What makes reward modeling both powerful and treacherous is its role as a proxy objective. The reward model is not human judgment itself -- it is a compressed, imperfect approximation of human judgment. Optimize against it too aggressively, and you encounter reward hacking (Goodhart's Law): the policy model discovers outputs that score highly on the proxy without being genuinely good. This tension between the utility and fragility of reward models is the central engineering challenge in RLHF.
Today, reward modeling is a rapidly evolving subfield encompassing process reward models (step-by-step verification), multi-objective reward models (balancing helpfulness, safety, and other axes), synthetic preference data generation (Constitutional AI, RLAIF), and sophisticated evaluation benchmarks like RewardBench. Whether you are building a conversational AI at a Bengaluru startup or aligning a frontier model at a major lab, understanding reward modeling is essential for anyone working on LLM alignment.
Concept Snapshot
- What It Is
- A supervised learning procedure that trains a model to assign scalar scores to text outputs such that higher scores correspond to outputs humans would prefer in pairwise comparisons.
- Category
- Model Training
- Complexity
- Advanced
- Inputs / Outputs
- Inputs: base LLM + dataset of human preference comparisons (chosen vs rejected response pairs). Outputs: a reward model that produces scalar scores reflecting human preference for any given prompt-response pair.
- System Placement
- Sits between instruction tuning (upstream) and RL policy optimization (downstream) in the RLHF alignment pipeline. The reward model is trained once and then used repeatedly during RL training.
- Also Known As
- preference model, reward function learning, preference reward model, RM training, human preference model
- Typical Users
- ML Engineers, Alignment Researchers, LLM Post-Training Engineers, Applied AI Scientists, AI Safety Researchers
- Prerequisites
- Language model fine-tuning (SFT/instruction tuning), Transformer architecture and classification heads, Cross-entropy and ranking losses, Human annotation pipelines for preference data, Reinforcement learning basics (PPO, policy gradient)
- Key Terms
- Bradley-Terry modelpairwise preferencescalar reward headchosen vs rejectedreward hackingGoodhart's Lawprocess reward model (PRM)outcome reward model (ORM)RewardBenchRLAIF
Why This Concept Exists
The Gap Between Instruction Following and Human Preference
Instruction tuning teaches a language model to follow instructions, but it does not teach it which of several valid responses is best. Given the prompt "Explain quantum entanglement," an instruction-tuned model can produce ten different grammatically correct, factually accurate explanations -- but some are more clear, more engaging, more appropriately detailed, and more honest about uncertainty than others. Reward modeling exists to capture these subtle, holistic quality signals that are easy for humans to express as comparisons but extremely difficult to encode as rules.
Why Pairwise Comparisons?
A foundational insight from the preference learning literature is that humans are much better at comparing two options than assigning absolute quality scores. Ask an annotator to rate a response on a 1-10 scale, and you get noisy, inconsistent labels with heavy inter-annotator disagreement. Ask the same annotator "Which of these two responses is better?" and agreement rates jump from ~60% to ~75-80%. This is why reward models are trained on pairwise comparisons rather than absolute ratings.
The idea traces back to the Bradley-Terry model (1952), a statistical model for paired comparisons originally developed for ranking chess players and sports teams. In the RLHF context, the Bradley-Terry model provides the theoretical foundation: the probability that response is preferred over response given prompt is modeled as a function of the difference in their reward scores.
The Historical Arc
Reward modeling for language model alignment emerged through several key milestones:
2017-2020: Early RLHF work. Christiano et al. (2017) demonstrated learning reward functions from human preferences in the Atari and MuJoCo domains. Stiennon et al. (2020) applied this to text summarization, training a reward model on human comparisons of summaries and using it to fine-tune GPT-3 via PPO.
2022: InstructGPT and the canonical pipeline. OpenAI's InstructGPT (Ouyang et al., 2022) established the three-stage pipeline: SFT -> Reward Modeling -> PPO. They collected 33K human comparisons of model outputs ranked by quality, trained a 6B reward model, and used it to align GPT-3. This became the template for nearly all subsequent alignment work.
2023-2024: Scaling and specialization. The field expanded rapidly: OpenAI released PRM800K (800K step-level labels for process reward models), Anthropic developed Constitutional AI for synthetic preference generation, and NVIDIA's Nemotron-4-340B-Reward topped alignment benchmarks. The emergence of RewardBench provided the first standardized evaluation for reward models.
Key Takeaway: Reward modeling exists because human preferences are nuanced, contextual, and impossible to fully capture in hand-written rules. By learning a differentiable proxy for human judgment from comparison data, we enable RL algorithms to optimize for what humans actually want -- with all the power and peril that entails.
Core Intuition & Mental Model
The Mental Model
Imagine you are a food critic training an apprentice. You cannot write down a complete set of rules for what makes a restaurant great -- the criteria are too subtle, too contextual, and too intertwined. Instead, you take the apprentice to restaurant after restaurant, ordering two dishes each time, and simply saying which one you prefer. After hundreds of such comparisons, the apprentice develops an internal "quality function" that can predict your preferences on dishes they have never seen. That internal quality function is the reward model.
Why It Works With Comparisons Instead of Scores
The comparison-based approach works because it sidesteps the calibration problem. If you asked the apprentice to rate each dish on a 1-10 scale, their ratings would drift over time (what seemed like a 7 last month now feels like a 6) and would be systematically different from your ratings. But if you only ask "which is better?," the signal is cleaner and more stable. The Bradley-Terry model formalizes this: we only need the difference between two scores to be meaningful, not their absolute values.
What the Reward Model Actually Learns
A well-trained reward model captures several dimensions simultaneously:
- Helpfulness: Does the response actually answer the question? Is it complete and accurate?
- Harmlessness: Does the response avoid generating toxic, dangerous, or misleading content?
- Honesty: Does the response appropriately express uncertainty? Does it refuse gracefully when it should?
- Style and coherence: Is the response well-organized, appropriately detailed, and engaging?
These dimensions are not learned as separate categories -- the reward model learns a single scalar that implicitly blends all of them based on the patterns in the preference data. This is both a strength (the model captures correlations humans might not articulate) and a weakness (the implicit blending can lead to unexpected tradeoffs when one dimension is over-represented in the training data).
Expert Insight: The highest-leverage investment in reward modeling is not architecture or hyperparameters -- it is the quality and diversity of the preference data. A reward model trained on noisy, biased comparisons will produce a noisy, biased proxy, and the RL policy will faithfully optimize for that noise.
Technical Foundations
Mathematical Formulation
Let denote a reward model parameterized by that maps a prompt and response to a scalar reward. Given a dataset of human preference comparisons where is the preferred ("chosen") response and is the dispreferred ("rejected") response, the reward model is trained to satisfy for all pairs.
Bradley-Terry Loss
The Bradley-Terry model (Bradley & Terry, 1952) models the probability that is preferred over as:
where is the sigmoid function . The training objective maximizes the log-likelihood:
This is equivalent to binary cross-entropy where the "label" is always 1 (the chosen response is always the positive example). The loss depends only on the difference , meaning the absolute scale of rewards is arbitrary -- only relative ordering matters.
Reward Model Architecture
The reward model is typically initialized from the same pretrained LLM (or the SFT model) and augmented with a scalar head -- a linear projection from the final hidden state to a single scalar:
where is the hidden representation at the end-of-sequence (EOS) token position, and are the learned scalar head parameters. Some implementations use a single gain and bias parameter applied to a specific logit, reducing the head to just 2 trainable parameters beyond the base model.
Process Reward Models (PRM)
For multi-step reasoning tasks (math, code), process reward models assign rewards to each intermediate step rather than only to the final answer:
where is the number of reasoning steps. The PRM provides fine-grained supervision: it can identify which step went wrong, enabling more targeted credit assignment during RL training. OpenAI's "Let's Verify Step by Step" (Lightman et al., 2023) showed that PRMs significantly outperform outcome reward models (ORMs) on the MATH benchmark, solving 78% of problems versus 72% for ORMs.
Reward Model Overoptimization (Scaling Laws)
Gao et al. (2022) established scaling laws for reward model overoptimization. As the RL policy optimizes against the proxy reward model, the gold (true human) reward initially increases but eventually decreases:
where is the KL divergence between the RL policy and the reference (SFT) policy. The first term captures improvement from optimization; the second captures degradation from overoptimization. The optimal KL budget depends on reward model size and training data size , with larger, better-trained reward models tolerating more optimization before overoptimization sets in.
Formal Property: The Bradley-Terry model assumes transitivity of preferences: if and , then . This assumption is often violated by real human preferences (intransitive cycles are common), which has motivated recent work on non-transitive preference models.
Internal Architecture
The reward model training pipeline consists of three major stages: preference data collection, reward model training with the Bradley-Terry objective, and integration with the RL training loop. The reward model itself is architecturally simple -- a pretrained language model with a scalar output head -- but the surrounding data and evaluation infrastructure is substantial.
The architecture has two distinct phases: an offline phase where the reward model is trained on preference data, and an online phase where the trained reward model scores candidate responses during RL training or inference-time selection. The offline phase is compute-intensive but runs once; the online phase runs continuously during RL training and must be efficient enough to score thousands of candidate responses per batch.
Key Components
Preference Data Collection Pipeline
The data backbone of reward modeling. Human annotators are presented with a prompt and two (or more) candidate responses generated by the SFT model, and they indicate which response is better. Common formats include binary comparison (A or B), ranked lists (rank 4 responses), and Likert-scale ratings (1-5 on multiple axes). InstructGPT collected 33K comparisons; production systems at scale collect 100K-1M+ comparisons. Indian annotation services through platforms like Karya and Scale AI typically cost INR 15-50 ($0.18-0.60) per comparison for English content, with Indic languages costing 20-40% more.
Base Model + Scalar Head
The reward model architecture is a pretrained LLM (often the same model used for SFT, or a smaller variant) with the language modeling head replaced by a scalar projection head. This head is a linear layer applied to the final hidden state at the EOS token position. NVIDIA's Nemotron-4-340B-Reward extends this to 5 scalar outputs (helpfulness, correctness, coherence, complexity, verbosity) for multi-attribute reward modeling.
Bradley-Terry Training Loop
The optimization loop that trains the reward model on preference pairs. For each batch, the model forward-passes both the chosen and rejected responses, extracts the scalar rewards at the EOS token, and computes the Bradley-Terry loss (negative log-sigmoid of the reward difference). Training typically converges in 1-2 epochs over the preference dataset, with learning rates of 1e-5 to 5e-6 for full fine-tuning. Gradient accumulation and bf16 mixed precision are standard.
Reward Normalization and Calibration
Raw reward scores from the scalar head can drift in scale and distribution during training. Normalization techniques include: running mean/variance normalization (subtract mean, divide by std of recent batch rewards), reward clipping (cap rewards at [-5, 5] to prevent outliers from destabilizing RL), and calibration to ensure reward differences correlate with human agreement rates. Well-calibrated reward models produce larger score gaps for pairs where annotators strongly agree and smaller gaps for ambiguous pairs.
Reward Model Ensemble (Optional)
Training multiple reward models on different data splits and averaging their predictions reduces overoptimization. Ensemble methods include simple averaging (mean of K reward models), worst-case (minimum reward across ensemble), and uncertainty-aware (downweight predictions where ensemble disagrees). Ensembles add K-fold inference cost but substantially increase the KL budget before overoptimization sets in.
Evaluation Suite (RewardBench)
Evaluates reward model quality on held-out preference pairs across multiple domains: chat, reasoning, safety, factuality, and instruction following. RewardBench (Lambert et al., 2024) is the standard benchmark, testing accuracy on prompt-chosen-rejected trios. RewardBench 2 adds calibration evaluation (ties between equally valid responses) and measures correlation with downstream RL performance. Agreement rate with human annotators on held-out data is the gold-standard evaluation metric.
Data Flow
Here's the end-to-end data flow:
Data Collection: The SFT model generates multiple candidate responses per prompt. Human annotators (or AI judges in RLAIF) compare pairs and indicate preferences. Raw comparisons are quality-filtered: ties are optionally discarded, low-confidence comparisons are flagged for re-annotation, and duplicate prompts are deduplicated.
Training: Preference pairs are tokenized with both chosen and rejected responses. The reward model forward-passes both, extracts EOS-token hidden states, projects to scalar rewards, and computes the Bradley-Terry loss. Training runs for 1-2 epochs with cosine learning rate scheduling and warmup.
Integration: The trained reward model is deployed as a scoring service during RL training. For each batch of RL-generated candidates, the reward model scores every response. These scores (minus a KL penalty) form the reward signal for PPO or other RL algorithms. Alternatively, the reward model can be used for best-of-N sampling at inference time: generate N candidates, score all N, and return the highest-scoring one.
A directed flow showing: the SFT Model generates candidate responses which go to human annotators, producing preference pairs. These pairs, combined with synthetic preferences (RLAIF) and quality filtering, form the training dataset. A base LLM with scalar head is trained on this dataset to produce a trained reward model. The reward model is then used for RL training (PPO/REINFORCE++), best-of-N sampling, and evaluated on RewardBench.
How to Implement
Practical Implementation Approaches
Reward model implementation divides into three tiers based on scale and requirements:
Tier 1: Full-parameter reward model training -- Initialize from the SFT model checkpoint, add a scalar head, and train on the full preference dataset. This provides the best quality reward signal but requires significant GPU memory (similar to SFT: ~56GB for a 7B model with Adam optimizer). This is the approach used by InstructGPT, Anthropic, and Meta for their frontier models.
Tier 2: LoRA/QLoRA reward model training -- Apply LoRA adapters to the base model and train only the adapters plus the scalar head on preference data. Reduces GPU memory by 60-80%, making 7B reward model training feasible on a single A100 or even an RTX 4090. Quality is typically within 1-3% of full fine-tuning on RewardBench.
Tier 3: LLM-as-judge (reward-model-free) -- Use a strong model (GPT-4, Claude) to directly score or compare responses, bypassing the need to train a dedicated reward model. This is increasingly popular for DPO-style training where you only need preference labels, not a differentiable reward function. Cost scales linearly with the number of comparisons.
Cost Context for India: Training a 7B reward model with full fine-tuning on 50K preference pairs takes 2-4 hours on 4x A100 80GB, costing approximately 3-6/hour for 1-2 hours, totaling 15,000-30,000). Indian annotation platforms like Karya offer competitive rates, especially for Indic language content. Synthetic preference generation via RLAIF can reduce data costs by 50-90%.
from datasets import load_dataset
from transformers import AutoTokenizer, AutoModelForSequenceClassification, TrainingArguments
from trl import RewardTrainer, RewardConfig
from peft import LoraConfig
# Load base model with classification head (1 label = scalar reward)
model_name = "meta-llama/Llama-2-7b-hf"
tokenizer = AutoTokenizer.from_pretrained(model_name)
tokenizer.pad_token = tokenizer.eos_token
model = AutoModelForSequenceClassification.from_pretrained(
model_name,
num_labels=1, # Single scalar output
torch_dtype="auto",
device_map="auto",
)
# Load preference dataset (chosen/rejected format)
# Dataset should have columns: prompt, chosen, rejected
dataset = load_dataset("Anthropic/hh-rlhf", split="train")
# LoRA config for memory efficiency
lora_config = LoraConfig(
r=16,
lora_alpha=32,
lora_dropout=0.05,
target_modules=["q_proj", "k_proj", "v_proj", "o_proj"],
task_type="SEQ_CLS",
modules_to_save=["score"], # Train the classification head fully
)
# Training configuration
training_args = RewardConfig(
output_dir="./reward-model-llama",
num_train_epochs=1,
per_device_train_batch_size=4,
gradient_accumulation_steps=4,
learning_rate=1.5e-5,
lr_scheduler_type="cosine",
warmup_ratio=0.03,
bf16=True,
logging_steps=10,
eval_strategy="steps",
eval_steps=200,
save_strategy="steps",
save_steps=500,
max_length=2048,
remove_unused_columns=False,
)
# Train
trainer = RewardTrainer(
model=model,
args=training_args,
train_dataset=dataset,
peft_config=lora_config,
tokenizer=tokenizer,
)
trainer.train()
trainer.save_model("./reward-model-llama-final")This example demonstrates reward model training using HuggingFace TRL's RewardTrainer. Key decisions: (1) AutoModelForSequenceClassification with num_labels=1 adds the scalar head automatically; (2) LoRA with modules_to_save=["score"] applies LoRA to attention layers but fully trains the classification head, since the head is randomly initialized and needs full gradient updates; (3) 1 epoch is typically sufficient for reward model training -- more epochs risk overfitting to the training comparisons and producing a reward model that does not generalize; (4) max_length=2048 should be set to match the expected response length during RL training.
import torch
import torch.nn as nn
import torch.nn.functional as F
from transformers import AutoModel
class RewardModel(nn.Module):
"""Reward model: pretrained LLM + scalar head."""
def __init__(self, model_name: str):
super().__init__()
self.backbone = AutoModel.from_pretrained(model_name)
self.scalar_head = nn.Linear(self.backbone.config.hidden_size, 1, bias=True)
# Initialize head with small weights for stable training
nn.init.normal_(self.scalar_head.weight, std=0.01)
nn.init.zeros_(self.scalar_head.bias)
def forward(self, input_ids, attention_mask):
"""Return scalar reward for each sequence in the batch."""
outputs = self.backbone(
input_ids=input_ids,
attention_mask=attention_mask,
)
# Get hidden state at the last non-padding token (EOS position)
hidden_states = outputs.last_hidden_state
# Find position of last non-padding token for each sequence
sequence_lengths = attention_mask.sum(dim=1) - 1
batch_indices = torch.arange(hidden_states.size(0), device=hidden_states.device)
eos_hidden = hidden_states[batch_indices, sequence_lengths]
# Project to scalar
reward = self.scalar_head(eos_hidden).squeeze(-1) # (batch_size,)
return reward
def bradley_terry_loss(rewards_chosen, rewards_rejected, margin=0.0):
"""Bradley-Terry preference loss with optional margin.
Args:
rewards_chosen: Scalar rewards for preferred responses (batch_size,)
rewards_rejected: Scalar rewards for rejected responses (batch_size,)
margin: Optional margin to enforce minimum reward gap
Returns:
Scalar loss value
"""
# Core BT loss: -log(sigmoid(r_chosen - r_rejected))
loss = -F.logsigmoid(rewards_chosen - rewards_rejected - margin)
return loss.mean()
def compute_accuracy(rewards_chosen, rewards_rejected):
"""Compute preference prediction accuracy."""
return (rewards_chosen > rewards_rejected).float().mean().item()
# Example training step
model = RewardModel("meta-llama/Llama-2-7b-hf")
optimizer = torch.optim.AdamW(model.parameters(), lr=1.5e-5, weight_decay=0.01)
# Simulate a training step with dummy data
batch_size = 4
seq_len = 512
chosen_ids = torch.randint(0, 32000, (batch_size, seq_len))
chosen_mask = torch.ones(batch_size, seq_len)
rejected_ids = torch.randint(0, 32000, (batch_size, seq_len))
rejected_mask = torch.ones(batch_size, seq_len)
# Forward pass for both chosen and rejected
rewards_chosen = model(chosen_ids, chosen_mask)
rewards_rejected = model(rejected_ids, rejected_mask)
# Compute loss and accuracy
loss = bradley_terry_loss(rewards_chosen, rewards_rejected)
accuracy = compute_accuracy(rewards_chosen, rewards_rejected)
loss.backward()
optimizer.step()
optimizer.zero_grad()
print(f"Loss: {loss.item():.4f}, Accuracy: {accuracy:.2%}")This implements the reward model architecture and Bradley-Terry loss from scratch. Key details: (1) The scalar head is a single linear layer projecting the EOS token's hidden state to a scalar -- this is the only new layer; the rest is the pretrained LLM backbone. (2) Head initialization with small weights (std=0.01) prevents large initial reward differences that could destabilize training. (3) The EOS token position is found dynamically using the attention mask, handling variable-length sequences correctly. (4) The optional margin parameter in the loss encourages a minimum gap between chosen and rejected rewards, improving calibration.
import openai
import json
import random
from typing import List, Dict, Tuple
from concurrent.futures import ThreadPoolExecutor, as_completed
client = openai.OpenAI()
# Constitutional AI principles for preference judgment
PRINCIPLES = [
"Which response is more helpful and directly addresses the user's question?",
"Which response is more honest and avoids making unsupported claims?",
"Which response is safer and avoids potentially harmful content?",
"Which response is more concise without sacrificing important information?",
"Which response demonstrates better reasoning and logical coherence?",
"Which response is more respectful and avoids condescending language?",
]
JUDGE_PROMPT = """You are evaluating two AI assistant responses to a user prompt.
User Prompt: {prompt}
Response A:
{response_a}
Response B:
{response_b}
Evaluation Criterion: {principle}
Based on this criterion, which response is better? Think step by step, then respond with ONLY a JSON object:
{{"winner": "A" or "B", "confidence": "high" or "medium" or "low", "reasoning": "brief explanation"}}"""
def generate_preference_pair(
prompt: str,
response_a: str,
response_b: str,
) -> Dict:
"""Use an LLM judge to create a preference comparison (RLAIF)."""
# Sample a random principle for evaluation
principle = random.choice(PRINCIPLES)
judge_input = JUDGE_PROMPT.format(
prompt=prompt,
response_a=response_a,
response_b=response_b,
principle=principle,
)
try:
response = client.chat.completions.create(
model="gpt-4o",
messages=[{"role": "user", "content": judge_input}],
temperature=0.0,
max_tokens=300,
)
result = json.loads(response.choices[0].message.content)
# Map to chosen/rejected format
if result["winner"] == "A":
chosen, rejected = response_a, response_b
else:
chosen, rejected = response_b, response_a
return {
"prompt": prompt,
"chosen": chosen,
"rejected": rejected,
"principle": principle,
"confidence": result.get("confidence", "medium"),
"reasoning": result.get("reasoning", ""),
}
except (json.JSONDecodeError, KeyError):
return None
def generate_synthetic_preferences(
prompts_and_responses: List[Dict],
max_workers: int = 10,
) -> List[Dict]:
"""Generate synthetic preference dataset using RLAIF."""
preferences = []
with ThreadPoolExecutor(max_workers=max_workers) as executor:
futures = {}
for item in prompts_and_responses:
future = executor.submit(
generate_preference_pair,
item["prompt"],
item["response_a"],
item["response_b"],
)
futures[future] = item
for future in as_completed(futures):
result = future.result()
if result and result["confidence"] != "low":
preferences.append(result)
# Filter to high-confidence preferences only
high_conf = [p for p in preferences if p["confidence"] == "high"]
print(f"Total pairs: {len(preferences)}, High confidence: {len(high_conf)}")
return preferences
# Example usage
sample_data = [
{
"prompt": "Explain gradient descent in simple terms.",
"response_a": "Gradient descent is an optimization algorithm used in ML.",
"response_b": "Imagine you're blindfolded on a hilly landscape, trying to find the lowest valley. Gradient descent works the same way -- you feel the slope under your feet and take a step downhill. Each step is guided by the gradient (the direction of steepest descent), and the step size is controlled by the learning rate.",
}
]
preferences = generate_synthetic_preferences(sample_data)
print(json.dumps(preferences[0], indent=2) if preferences else "No results")This implements RLAIF (RL from AI Feedback), the technique behind Anthropic's Constitutional AI for generating synthetic preference data without human annotators. Key design choices: (1) Random principle sampling ensures diverse evaluation criteria across the dataset, preventing the reward model from learning a single-axis preference; (2) Confidence filtering discards ambiguous comparisons where the LLM judge is uncertain, improving data quality; (3) Chain-of-thought reasoning in the judge prompt improves comparison accuracy. The cost is approximately $0.01-0.05 per comparison (~INR 0.8-4.2), compared to INR 25-50 for human annotation -- a 10-50x reduction.
import torch
from transformers import AutoTokenizer, AutoModelForSequenceClassification
from datasets import load_dataset
from typing import Dict, List
import numpy as np
def evaluate_reward_model(
model_name: str,
eval_dataset_name: str = "allenai/reward-bench",
batch_size: int = 8,
) -> Dict[str, float]:
"""Evaluate a reward model on RewardBench categories."""
tokenizer = AutoTokenizer.from_pretrained(model_name)
tokenizer.pad_token = tokenizer.eos_token
model = AutoModelForSequenceClassification.from_pretrained(
model_name,
torch_dtype=torch.bfloat16,
device_map="auto",
)
model.eval()
dataset = load_dataset(eval_dataset_name, split="test")
# Track accuracy by category
category_results: Dict[str, List[bool]] = {}
for i in range(0, len(dataset), batch_size):
batch = dataset[i:i + batch_size]
for j in range(len(batch["prompt"])):
prompt = batch["prompt"][j]
chosen = batch["chosen"][j]
rejected = batch["rejected"][j]
category = batch.get("subset", ["general"] * len(batch["prompt"]))[j]
# Score chosen response
chosen_input = tokenizer(
prompt + chosen,
return_tensors="pt",
truncation=True,
max_length=2048,
padding=True,
).to(model.device)
# Score rejected response
rejected_input = tokenizer(
prompt + rejected,
return_tensors="pt",
truncation=True,
max_length=2048,
padding=True,
).to(model.device)
with torch.no_grad():
chosen_reward = model(**chosen_input).logits.squeeze().item()
rejected_reward = model(**rejected_input).logits.squeeze().item()
correct = chosen_reward > rejected_reward
if category not in category_results:
category_results[category] = []
category_results[category].append(correct)
# Compute per-category accuracy
results = {}
for category, corrections in category_results.items():
results[category] = np.mean(corrections)
results["overall"] = np.mean([
correct for corrections in category_results.values()
for correct in corrections
])
return results
# Evaluate
results = evaluate_reward_model("./reward-model-llama-final")
for category, accuracy in sorted(results.items()):
print(f"{category:30s} {accuracy:.1%}")This evaluates a trained reward model on RewardBench, the standard benchmark for reward model quality. The evaluation is straightforward: for each prompt-chosen-rejected trio, the reward model should assign a higher score to the chosen response. Accuracy is computed per category (chat, reasoning, safety) and overall. State-of-the-art reward models achieve 85-95% on RewardBench, with safety being the easiest category and subtle reasoning being the hardest. Models below 75% overall are unlikely to provide a useful RL training signal.
# OpenRLHF configuration for reward model training (YAML)
reward_model:
base_model: meta-llama/Llama-2-7b-hf
num_labels: 1
max_length: 2048
training:
num_epochs: 1
micro_batch_size: 2
global_batch_size: 64
learning_rate: 1.5e-5
lr_scheduler: cosine
warmup_ratio: 0.03
weight_decay: 0.01
bf16: true
gradient_checkpointing: true
zero_stage: 3 # DeepSpeed ZeRO-3
data:
dataset: Anthropic/hh-rlhf
eval_split: 0.05
max_pairs_per_prompt: 8
filter_low_confidence: true
peft:
adapter: lora
lora_r: 16
lora_alpha: 32
lora_dropout: 0.05
target_modules:
- q_proj
- k_proj
- v_proj
- o_proj
modules_to_save:
- score # Fully train the scalar head
evaluation:
eval_steps: 200
rewardbench: true
log_reward_distributions: trueCommon Implementation Mistakes
- ●
Training for too many epochs: Reward models are extremely prone to overfitting because the training signal (pairwise comparisons) is less informative than supervised regression. Training for more than 1-2 epochs on typical preference datasets causes the model to memorize specific comparison patterns rather than learning generalizable quality signals. Monitor validation accuracy and stop early.
- ●
Ignoring reward scale normalization: Raw reward scores can drift to extreme values during RL training, destabilizing PPO. Always normalize rewards (subtract running mean, divide by running std) before using them as RL signals. Without normalization, reward hacking becomes much worse because the policy can find regions of extreme reward that the reward model was never calibrated for.
- ●
Using a reward model much smaller than the policy model: If the reward model is significantly smaller than the policy being optimized, it lacks the capacity to distinguish subtle quality differences that the policy model can exploit. A common rule of thumb: the reward model should be at least the same size as the policy model. InstructGPT used a 6B reward model for a 175B policy, which worked but required careful KL regularization.
- ●
Not deduplicating preference data by prompt: If the same prompt appears with different response pairs, the reward model can learn prompt-specific biases rather than generalizable quality signals. Deduplicate or limit the number of comparisons per prompt (typically 4-8 comparisons per prompt is optimal).
- ●
Failing to filter low-quality annotations: Human annotators have significant disagreement rates (typically 20-30% on challenging comparisons). Training on comparisons where annotators disagree injects noise into the reward model. Filter to comparisons with high inter-annotator agreement (2/3 or 3/3 majority agreement) for the core training set.
- ●
Not evaluating reward model calibration: A reward model that achieves 90% accuracy but assigns nearly identical scores to chosen and rejected responses provides a weak training signal. Evaluate not just accuracy but the distribution of score differences -- well-calibrated models produce larger gaps for clearly different responses and smaller gaps for close comparisons.
When Should You Use This?
Use When
You are building an RLHF pipeline and need a differentiable reward signal for PPO, REINFORCE++, or similar RL algorithms to optimize against
You have access to 10K+ human preference comparisons (or can generate synthetic preferences via RLAIF) and need to distill them into a reusable scoring function
You want to use best-of-N sampling at inference time: generate N candidate responses and select the one with the highest reward score, without running full RL
You need to evaluate and compare the quality of model outputs at scale (e.g., filtering synthetic data, ranking responses for annotation, monitoring model quality in production)
You are building a multi-step reasoning system and need process-level verification (PRM) to identify which reasoning steps are correct vs. incorrect
You need a continuous quality signal that can be used for rejection sampling, iterative refinement, or curriculum learning during model training
Avoid When
You can use DPO, ORPO, or other direct alignment algorithms that bypass the need for an explicit reward model by learning directly from preference pairs -- these are simpler, cheaper, and increasingly competitive
Your preference dataset is very small (< 5K comparisons) -- the reward model will overfit and provide a poor proxy. Consider DPO or few-shot LLM-as-judge instead
Your task has easily verifiable correct answers (e.g., code that either passes tests or does not, math with ground truth) -- use rule-based rewards or verifiers instead of a learned reward model
You lack the compute to train a reward model of sufficient capacity relative to your policy model -- an undersized reward model is easily exploited
Your preference data comes from a narrow, homogeneous annotator pool -- the reward model will learn the biases of that pool and may not generalize to broader user populations
You only need to align for a single, well-defined objective (e.g., factual accuracy) that can be captured by a deterministic metric -- reward models add unnecessary complexity for simple objectives
Key Tradeoffs
Reward Model Size vs. Robustness
Larger reward models are harder for the RL policy to exploit (hack), because they have more capacity to represent nuanced preferences. Gao et al. (2022) showed that doubling the reward model parameter count increases the optimal KL budget before overoptimization by roughly 40%. However, larger reward models also cost more to run during RL training -- every candidate response in every RL batch must be scored.
| Reward Model Size | Robustness | RL Scoring Cost | Typical Use |
|---|---|---|---|
| 1-3B parameters | Low -- easily hacked | Low (~$0.001/score) | Research, prototyping |
| 7-13B parameters | Medium | Medium (~$0.005/score) | Production alignment |
| 34-70B parameters | High | High (~$0.02/score) | Frontier model alignment |
| Ensemble (3x 7B) | Very high | 3x medium | Safety-critical applications |
Human Data vs. Synthetic Data (RLAIF)
Human preference data is the gold standard but expensive: INR 25-50 (1-3 per comparison in the US. Synthetic preferences via RLAIF cost INR 0.8-4.2 ($0.01-0.05) per comparison -- a 10-50x reduction. However, synthetic preferences inherit the biases and limitations of the judge model. The optimal strategy for most teams is a hybrid approach: 5K-10K human comparisons for calibration and safety, supplemented with 50K-100K synthetic comparisons for coverage and diversity.
Outcome Reward Models (ORM) vs. Process Reward Models (PRM)
ORMs score the final response as a whole -- simpler to train (one label per response) but provide sparse credit assignment for multi-step reasoning. PRMs score each step individually -- much more informative but require step-level labels that are 5-10x more expensive to collect. OpenAI's results show PRMs solving 78% of MATH problems vs. 72% for ORMs, but the annotation cost for PRM800K (800K step-level labels) was enormous. For non-reasoning tasks (chat, summarization), ORMs are sufficient and much cheaper.
Alternatives & Comparisons
DPO eliminates the need for an explicit reward model by reparameterizing the RL objective as a supervised loss directly on preference pairs. DPO is simpler (no separate RM training, no PPO), cheaper (one training stage instead of two), and increasingly competitive. Choose reward modeling + PPO when you need inference-time scoring (best-of-N), when you want to decouple the reward signal from the policy, or when you need the reward model for monitoring/evaluation beyond training.
ORPO combines SFT and preference alignment into a single training stage, using an odds-ratio-based penalty that contrasts chosen and rejected responses without a separate reward model. ORPO is the simplest alignment method -- no RM, no RL, single stage. Choose reward modeling when you need a reusable scoring function, process-level rewards, or multi-objective reward decomposition.
RLHF is the complete pipeline that uses the reward model: SFT -> RM training -> RL (PPO/REINFORCE++). Reward modeling is a component of RLHF, not an alternative to it. The choice is whether to use RLHF (which requires a reward model) vs. direct alignment methods (DPO/ORPO, which do not).
Constitutional AI generates synthetic preference data using AI feedback against a set of principles, then trains a reward model on that synthetic data (RLAIF). It is not a replacement for reward modeling but a method for generating preference data for reward model training at lower cost. Choose Constitutional AI when human annotation is too expensive or when you need principled, consistent preference signals at scale.
Direct human evaluation (A/B testing, Likert ratings) provides the ground truth that reward models approximate. Use human evaluation for final model assessment and reward model validation, but use trained reward models for the large-scale scoring needed during RL training and inference-time selection. Human evaluation is too slow and expensive for the thousands of scoring calls needed per RL training batch.
Pros, Cons & Tradeoffs
Advantages
Enables scalable RL optimization: The reward model converts expensive, slow human judgments into a fast, differentiable scoring function that PPO and other RL algorithms can optimize against at scale -- scoring millions of candidate responses per training run
Captures nuanced, holistic preferences: Unlike rule-based metrics (BLEU, ROUGE, exact match), reward models learn to evaluate subtle qualities like helpfulness, tone, and appropriate detail level that humans value but cannot easily formalize as rules
Reusable across multiple applications: Once trained, a reward model can be used for RL training, best-of-N sampling at inference, data filtering, quality monitoring in production, and training data curation -- amortizing the annotation cost across many use cases
Supports process-level supervision: Process reward models (PRMs) provide step-by-step verification for reasoning tasks, enabling targeted feedback that identifies exactly which step in a chain-of-thought is incorrect, dramatically improving mathematical reasoning
Enables multi-objective decomposition: Multi-attribute reward models (like NVIDIA Nemotron) decompose preferences into interpretable axes (helpfulness, safety, coherence, verbosity), allowing fine-grained control over the tradeoff between objectives during RL training
Compatible with synthetic data scaling: RLAIF and Constitutional AI techniques can generate high-quality preference data at 10-50x lower cost than human annotation, making reward model training accessible to smaller teams and startups
Disadvantages
Reward hacking (Goodhart's Law): The reward model is an imperfect proxy for human preference. RL policies inevitably discover high-reward outputs that exploit flaws in the reward model without being genuinely good -- longer responses, sycophantic agreement, confident-sounding nonsense. This is the fundamental limitation of all learned reward functions.
Expensive preference data collection: High-quality human preference data costs INR 25-50 (15,000-30,000) is often the dominant cost in the RLHF pipeline.
Adds pipeline complexity: The reward model is an additional model to train, evaluate, deploy, and maintain. It introduces a two-stage training process (RM then RL) with cascading hyperparameter sensitivity. DPO-style methods that bypass the reward model are simpler and increasingly competitive.
Annotator bias amplification: The reward model faithfully learns the biases present in the preference data -- including cultural biases, political leanings, and demographic preferences of the annotator pool. These biases are then amplified by RL optimization, potentially producing models that are well-aligned to annotators but poorly aligned to the broader user population.
Calibration degrades under distribution shift: Reward models trained on one distribution of prompts and responses may produce unreliable scores on out-of-distribution inputs. As the RL policy drifts away from the SFT distribution during training, the reward model's scores become increasingly unreliable.
Scaling cost during RL training: Every candidate response in every RL batch must be scored by the reward model, adding significant inference cost during training. For a 7B reward model scoring 128 candidates per batch across 10K training steps, the scoring cost alone can exceed the SFT training cost.
Failure Modes & Debugging
Reward hacking via length exploitation
Cause
Human annotators often prefer longer, more detailed responses, creating a correlation between length and reward. The RL policy learns to exploit this by generating unnecessarily verbose responses that score highly on the reward model without adding substantive value.
Symptoms
Responses become progressively longer over RL training (2x-5x increase in average response length). Reward scores increase steadily but human evaluation shows quality plateaus or decreases. The model adds filler phrases, unnecessary caveats, and redundant explanations to pad length.
Mitigation
Include a length penalty in the reward: . Train the reward model on length-controlled comparisons where both responses have similar length. Use NVIDIA SteerLM-style multi-attribute rewards with an explicit verbosity dimension. Monitor response length during RL training and flag runs where average length increases by more than 50%.
Sycophancy amplification
Cause
Annotators tend to prefer responses that agree with the user's stated position, even when the user is wrong. The reward model learns to assign higher scores to agreeable, non-confrontational responses, and RL amplifies this into full sycophancy.
Symptoms
The model agrees with factually incorrect statements from the user. It rarely says "I don't know" or "That's not quite right." It changes its answer when the user pushes back, even when the original answer was correct. Reward scores on sycophancy-probing test sets are anomalously high.
Mitigation
Include adversarial preference pairs where the chosen response disagrees with the user when appropriate. Add explicit anti-sycophancy examples: prompts with incorrect premises where the preferred response is a polite correction. Use Anthropic's constitutional AI approach with principles like "Choose the response that is truthful even if it disagrees with the human." Evaluate with TruthfulQA-style benchmarks that test resistance to suggestive prompts.
Reward model overoptimization collapse
Cause
The RL policy is optimized too aggressively against the reward model (KL divergence from the SFT policy exceeds the reward model's reliable region). The reward model produces high scores in regions of output space it was never trained on, and the policy collapses to these degenerate outputs.
Symptoms
Reward scores skyrocket during RL training (often 2-3 standard deviations above the training distribution), but response quality collapses. Outputs become repetitive, nonsensical, or pathologically patterned. The KL divergence between the RL policy and SFT policy grows without bound.
Mitigation
Enforce a KL penalty in the RL objective: with . Use reward model ensembles and take the minimum across ensemble members (pessimistic evaluation). Apply Gao et al.'s scaling laws to determine the optimal KL budget for your reward model size. Monitor the ratio of reward increase to KL increase; if reward increases faster than KL, overoptimization is likely beginning.
Distribution collapse from homogeneous preference data
Cause
The preference dataset was collected from a narrow annotator pool (e.g., all annotators from one demographic, one cultural background, or one expertise level). The reward model learns the preferences of this specific group, not general human preferences.
Symptoms
The reward model strongly prefers a particular response style (e.g., formal academic language, specific cultural references, particular levels of detail) regardless of the prompt context. Performance on RewardBench safety and cultural sensitivity categories drops significantly. Users from different backgrounds report lower satisfaction than the annotator demographic.
Mitigation
Collect preference data from diverse annotator pools spanning demographics, expertise levels, and cultural backgrounds. Use multi-objective reward models that decompose preferences into interpretable dimensions, allowing downstream adjustment of the reward signal. Include preference data from Indian annotators for Indic-language applications. Regularly evaluate the reward model on held-out data from underrepresented annotator groups.
Process reward model mislabeling (PRM)
Cause
In process reward models, step-level labels are assigned by human annotators or automated systems that may incorrectly mark valid intermediate steps as incorrect (false negatives) or incorrect steps as valid (false positives). Error rates of 10-20% on step-level labels are common.
Symptoms
The PRM penalizes valid reasoning approaches that happen to differ from the annotated "correct" path. The model converges on a narrow set of reasoning strategies that match the annotation patterns rather than exploring diverse valid approaches. Performance on held-out problems with novel solution strategies is lower than expected.
Mitigation
Use majority voting across multiple annotators (3-5 annotators per step) for step-level labels. Supplement human labels with automated verification where possible (e.g., checking mathematical steps with symbolic computation). Apply label smoothing to PRM training to reduce confidence on potentially mislabeled steps. Use the Math-Shepherd approach (Wan et al., 2023) to generate step-level labels automatically from outcome-level supervision, trading some accuracy for vastly more data.
Reward model stale after policy improvement
Cause
The reward model was trained on preference data generated by an earlier, weaker version of the policy model. As the policy improves through RL training, it generates outputs that are qualitatively different from the reward model's training distribution, making the reward model's scores unreliable.
Symptoms
Reward scores plateau or become noisy in later stages of RL training. The RL policy appears to stop improving despite continued training. Evaluating new policy outputs with human raters shows improvement, but the reward model does not reflect this improvement. The gap between reward model scores and human evaluation widens over time.
Mitigation
Implement iterative reward model training: periodically generate new preference data using the current RL policy, collect fresh human (or AI) comparisons, and retrain the reward model. Meta's Llama 3 used multiple rounds of iterative alignment for this reason. Alternatively, use online RLHF approaches where the reward model is updated concurrently with the policy. Monitor the reward model's held-out accuracy on freshly generated policy outputs.
Placement in an ML System
Where Reward Modeling Sits in the ML System
Reward modeling occupies the critical middle position in the RLHF alignment pipeline:
- Instruction Tuning (SFT): Teaches the model to follow instructions using supervised learning on demonstrations. Produces the initial policy that generates candidate responses for preference collection.
- Reward Modeling: Trains a scalar scoring function on human preference comparisons. The reward model distills human judgment into a differentiable, scalable signal.
- RL Policy Optimization (PPO/REINFORCE++): Optimizes the language model against the reward model signal, with KL regularization to prevent overoptimization.
In production ML systems, the reward model serves multiple roles beyond RL training. It is used for best-of-N sampling at inference time (generate N responses, return the best-scoring one), for quality filtering of synthetic training data, for A/B test scoring of model variants, and for production monitoring of response quality.
For Indian AI companies building alignment pipelines -- whether Krutrim developing multilingual assistants, Sarvam AI working on Indic language models, or enterprise teams at TCS/Infosys building domain-specific copilots -- the reward model is the component that determines what 'good output' means for their specific user population. Getting the preference data right, including Indic-language comparisons and India-specific cultural context, is essential for building models that are well-aligned to Indian users.
Pipeline Stage
Training / Alignment
Upstream
- instruction-tuning
- full-fine-tuning
- lora-fine-tuning
Downstream
- rlhf
- dpo
- constitutional-ai
Scaling Bottlenecks
The primary bottleneck is preference data collection at scale. Human annotation throughput is limited to approximately 20-50 comparisons per annotator per hour for complex prompts. At 50K comparisons needed for a production reward model, this requires 1,000-2,500 annotator-hours, or roughly 2-4 weeks with a team of 20 annotators. In India, annotation teams from Karya, Scale AI, or internal teams at companies like Flipkart or Swiggy can reduce calendar time by parallelizing, but quality control (inter-annotator agreement, calibration) adds overhead.
During RL training, every candidate response must be scored by the reward model. For a typical PPO batch of 128 prompts with 4 candidate responses each, that is 512 reward model forward passes per batch. With 10K training steps, the reward model performs ~5M forward passes. For a 7B reward model, this requires dedicated GPU allocation for inference throughout RL training -- typically 1-2 GPUs just for reward scoring, in addition to the GPUs running the policy model.
Larger reward models are more robust to hacking but more expensive to run. A 70B reward model requires 4x A100 80GB just for inference, and scoring latency (100-500ms per response) can become the RL training bottleneck. Solutions include reward model distillation (training a smaller model to approximate the large one), reward caching (caching scores for previously seen responses), and asynchronous scoring (decoupling reward computation from the RL training loop).
Production Case Studies
InstructGPT (Ouyang et al., 2022) established the canonical reward modeling pipeline. OpenAI collected ~33K human comparisons of GPT-3 outputs ranked by quality, trained a 6B-parameter reward model with a scalar head, and used it with PPO to align a 175B-parameter GPT-3. The reward model was trained on the Bradley-Terry objective with careful data collection: annotators ranked 4-9 candidate responses per prompt, generating pairwise comparisons per annotation batch.
InstructGPT's 1.3B aligned model was preferred by human raters over the 175B base GPT-3, demonstrating that alignment (via reward modeling + PPO) can compensate for 100x fewer parameters. The reward model achieved ~72% agreement with held-out human preferences, providing a strong enough signal for effective RL training.
Let's Verify Step by Step (Lightman et al., 2023) introduced large-scale process reward modeling. OpenAI trained process reward models (PRMs) on PRM800K, a dataset of 800,000 step-level correctness labels for model-generated solutions to MATH problems. Each step in a chain-of-thought solution was labeled as correct, incorrect, or neutral by human annotators.
Process supervision significantly outperformed outcome supervision: the best PRM solved 78.2% of MATH test problems compared to 72.4% for the best ORM. Active learning reduced annotation cost by selecting the most informative steps for labeling. OpenAI released PRM800K as an open dataset, catalyzing research on process reward models.
NVIDIA's Nemotron-4-340B-Reward and Llama-3.1-Nemotron-70B-Reward pioneered multi-attribute reward modeling using the SteerLM approach. Instead of a single scalar reward, these models output scores on 5 dimensions: helpfulness, correctness, coherence, complexity, and verbosity. The Nemotron-70B-Reward model combined Bradley-Terry training with SteerLM regression to achieve state-of-the-art results.
As of October 2024, Llama-3.1-Nemotron-70B-Reward was ranked #1 on RewardBench, RM-Bench, and JudgeBench, outperforming GPT-4o and Claude 3.5 Sonnet on automatic alignment benchmarks. The multi-attribute approach enabled downstream users to weight reward dimensions based on their application needs, providing more controllable alignment.
Anthropic's Constitutional AI (Bai et al., 2022) demonstrated that reward models can be trained on synthetic preference data generated by AI, eliminating the need for human annotators on harmlessness comparisons. An LLM critiques its own outputs against a set of principles (the "constitution"), generating pairwise preferences that are used to train the reward model for the RLAIF (RL from AI Feedback) stage.
The Constitutional AI approach produced models that were both more helpful and more harmless than models trained with human preference data alone. It reduced human annotation costs by 50-90% for the harmlessness dimension while maintaining or improving alignment quality. The approach has been widely adopted, with RLAIF becoming standard practice for scaling preference data generation.
RewardBench (Lambert et al., 2024) established the first standardized evaluation benchmark for reward models. The benchmark consists of prompt-chosen-rejected trios spanning chat, reasoning, safety, and prior sets, testing whether reward models correctly prefer human-preferred responses. RewardBench 2 extended this with factuality, precise instruction following, and calibration (ties) evaluation.
RewardBench revealed that many popular reward models had significant weaknesses: some excelled at chat but failed at safety, others showed poor calibration. The benchmark became the standard evaluation for reward model development, with the leaderboard hosted on HuggingFace Spaces driving rapid improvement in reward model quality across the community.
Tooling & Ecosystem
HuggingFace's library for LLM alignment. The RewardTrainer class provides end-to-end reward model training with built-in support for the Bradley-Terry loss, chosen/rejected data formatting, conversational dataset handling, LoRA/QLoRA, and PEFT integration. The most widely used tool for reward model training in the open-source community.
A scalable, high-performance RLHF framework built on Ray and vLLM. Supports reward model training, PPO, REINFORCE++, GRPO, and process reward models (PRM). Designed for distributed training across multiple nodes, with tight integration between reward model inference and RL policy optimization.
The standard evaluation benchmark for reward models, from Allen AI. Tests reward model accuracy across chat, reasoning, safety, and calibration categories. Includes a HuggingFace leaderboard for comparing reward models. Essential for validating that a trained reward model provides a useful training signal.
NVIDIA's scalable toolkit for model alignment, supporting SteerLM multi-attribute reward model training, standard Bradley-Terry RM training, DPO, and RLHF. Optimized for multi-GPU/multi-node training with Megatron parallelism. Powers the Nemotron reward model family.
Recipes and scripts for training reward models for RLHF, iterative SFT, and iterative DPO. Provides practical, well-documented training pipelines for both Bradley-Terry and regression-based reward models. Includes data processing utilities for common preference datasets.
A collaboration platform for AI engineers and domain experts to build high-quality datasets. Provides annotation interfaces for pairwise preference collection, quality monitoring, and inter-annotator agreement tracking. Useful for managing the human annotation pipeline that produces reward model training data.
Research & References
Ouyang, Wu, Jiang, Almeida, Wainwright, Mishkin, Zhang, Agarwal, Slama, Ray, Schulman, Hilton, Kelton, Miller, Simens, Askell, Welinder, Christiano, Leike & Lowe (2022)NeurIPS 2022
Established the canonical RLHF pipeline (SFT -> Reward Modeling -> PPO). Demonstrated that a 6B reward model trained on 33K human comparisons could effectively align a 175B policy model, with the aligned 1.3B model preferred over the unaligned 175B base model by human raters.
Lightman, Kosaraju, Burda, Edwards, Baker, Lee, Leike, Schulman, Sutskever & Cobbe (2023)ICLR 2024
Demonstrated that process reward models (PRMs) significantly outperform outcome reward models (ORMs) for mathematical reasoning, with PRMs solving 78.2% vs. 72.4% of MATH problems. Released PRM800K, a dataset of 800K step-level human feedback labels that catalyzed PRM research.
Gao, Schulman & Hilton (2022)ICML 2023
Established empirical scaling laws showing that gold reward initially increases then decreases as optimization against a proxy reward model increases (Goodhart's Law). Found that the optimal KL budget scales with reward model size and data size, providing practical guidelines for how aggressively to optimize against learned reward models.
Bai, Kadavath, Kundu, Askell, Kernion, Jones, Chen, Goldie, Mirhoseini, McKinnon, Chen, Olsson, Olah, Hernandez, Drain, Ganguli, Li, Tran-Johnson, Perez, Kerr, Mueller, Ladish, Landau, Ndousse, Lukosuite, Lovitt, Sellitto, Elhage, Schiefer, Mercado, DasSarma, Lasenby, Larson, Ringer, Johnston, Kravec, El Showk, Fort, Lanham, Telleen-Lawton, Conerly, Henighan, Hume, Bowman, Hatfield-Dodds, Mann, Amodei, Joseph, McCandlish, Brown & Kaplan (2022)arXiv preprint
Introduced RLAIF -- training reward models on AI-generated preference data rather than human annotations. Showed that AI feedback guided by constitutional principles produces reward models that are competitive with human-feedback-trained ones, reducing annotation costs by 50-90% for harmlessness evaluation.
Wang, Dong, Li, Zeng, He, Deng, Nie, Singh, Zhang & Ji (2024)arXiv preprint
Proposed ArmoRM, a multi-objective reward model that decomposes preferences into interpretable dimensions (helpfulness, safety, verbosity, etc.) using a Mixture-of-Experts gating network. ArmoRM-Llama3-8B achieved state-of-the-art on RewardBench, demonstrating that multi-objective decomposition improves both accuracy and interpretability.
Lambert, Pyatkin, Morrison, Miranda, Lin, Chandu, Dziri, Kumar, Zick, Choi & Smith (2024)arXiv preprint
Established the first standardized benchmark for evaluating reward models across chat, reasoning, safety, and calibration. Revealed that many reward models have significant domain-specific weaknesses, and that benchmark performance correlates with downstream RL training effectiveness.
Dong, Xiong, Pang, Wang, Zhao, Du, Jiang, Zhang (2024)arXiv preprint
Provided a comprehensive practical recipe for the full RLHF workflow, covering reward model training with Bradley-Terry, iterative online RLHF where the reward model is updated concurrently with the policy, and practical implementation details for scaling RLHF to production quality.
Interview & Evaluation Perspective
Common Interview Questions
- ●
What is a reward model and why is it needed for RLHF?
- ●
Explain the Bradley-Terry model and how it is used to train reward models from pairwise comparisons.
- ●
What is reward hacking (Goodhart's Law) and how do you mitigate it?
- ●
Compare process reward models (PRMs) with outcome reward models (ORMs). When would you use each?
- ●
How would you design a preference data collection pipeline for training a reward model at an Indian AI startup?
- ●
What are the scaling laws for reward model overoptimization? How do they inform your choice of KL penalty?
- ●
How does Constitutional AI (RLAIF) reduce the cost of reward model training, and what are its limitations?
Key Points to Mention
- ●
The reward model is a learned proxy for human judgment, not a substitute for it. This proxy nature is what enables scale (millions of scoring calls during RL) but also introduces the fundamental failure mode of reward hacking (Goodhart's Law).
- ●
The Bradley-Terry loss depends only on the difference between chosen and rejected rewards, not their absolute values. This means reward scale is arbitrary -- only relative ordering matters. This has practical implications: you cannot compare raw reward scores across different prompts or models without normalization.
- ●
Process reward models (PRMs) outperform outcome reward models (ORMs) on multi-step reasoning tasks (78% vs. 72% on MATH), but require step-level labels that are 5-10x more expensive to collect. For non-reasoning tasks, ORMs are sufficient.
- ●
The KL penalty in RL training is not optional -- it is the primary defense against reward model overoptimization. Gao et al.'s scaling laws show that gold reward follows , with the optimal KL budget depending on reward model capacity.
- ●
Reward model ensembles are the strongest defense against reward hacking: train K reward models on different data splits and take the pessimistic (minimum) reward. This increases the KL budget before overoptimization by 2-3x at the cost of K-fold inference.
- ●
For Indian applications, preference data should include Indic-language comparisons and India-specific cultural context. Translating English preference data misses code-mixing patterns and cultural norms.
Pitfalls to Avoid
- ●
Treating the reward model as ground truth rather than an imperfect proxy. The reward model's accuracy is typically 70-85% on held-out comparisons -- far from perfect.
- ●
Confusing reward modeling with the full RLHF pipeline. Reward modeling is one component; the RL optimization stage (PPO/REINFORCE++) is separate and has its own failure modes.
- ●
Not discussing the cost of preference data. A complete answer acknowledges that data collection (not compute) is often the dominant cost in reward model training.
- ●
Ignoring reward model evaluation. A strong answer mentions RewardBench, calibration metrics, and the importance of validating the reward model before using it for RL.
- ●
Suggesting that larger reward models are always better without discussing the inference cost during RL training. Every scoring call has latency and compute cost.
Senior-Level Expectation
A senior/staff candidate should be able to design a complete reward modeling pipeline: data collection strategy (how many comparisons, from what annotator pool, with what quality controls), architecture decisions (model size relative to policy, scalar vs. multi-attribute head), training configuration (loss function, epochs, learning rate), evaluation protocol (RewardBench, calibration, held-out human agreement), and integration with RL training (KL budget, reward normalization, when to retrain). They should discuss the fundamental tension between reward model fidelity and optimization pressure (Goodhart's Law), with specific reference to the Gao et al. scaling laws. Cost analysis should include both data costs (INR 25-50 per comparison) and compute costs (reward model inference during RL). The ability to articulate when NOT to use a reward model (use DPO, rule-based rewards, or LLM-as-judge instead) is a strong senior signal. Experience with iterative RLHF (where the reward model is retrained as the policy improves) and process reward models (for reasoning tasks) distinguishes exceptional candidates.
Summary
Let's recap the key ideas we've covered:
Reward modeling is the process of training a neural network to predict human preferences from pairwise comparisons. The reward model -- typically a pretrained LLM with a scalar output head -- learns to assign higher scores to responses that humans would prefer, creating a differentiable proxy for human judgment that can be used for RL training at scale. The mathematical foundation is the Bradley-Terry model, where the probability of preferring one response over another is modeled as the sigmoid of their reward difference.
The central tension in reward modeling is between utility and fragility. The reward model enables scalable optimization (millions of scoring calls during RL training), but it is an imperfect proxy that is vulnerable to reward hacking (Goodhart's Law). Gao et al.'s scaling laws formalize this: gold reward follows , with optimization eventually hurting true quality. Defenses include KL penalties, reward model ensembles, normalization, and iterative retraining.
The field has expanded beyond simple scalar reward models in several directions: process reward models (PRMs) provide step-level supervision for reasoning tasks (78% vs. 72% on MATH); multi-objective reward models (SteerLM, ArmoRM) decompose preferences into interpretable axes; and synthetic preference generation (Constitutional AI, RLAIF) reduces annotation costs by 10-50x. Evaluation has matured with RewardBench providing standardized benchmarks.
Reward modeling sits at the heart of RLHF, serving as the bridge between expensive human judgment and scalable model optimization. Whether you are training a multilingual assistant for Indian users, building a reasoning model that verifies its own chain of thought, or aligning a frontier model for safety, the quality of your reward model sets the ceiling for your alignment pipeline. The field continues to evolve rapidly, with active research into reward model robustness, process supervision, multi-objective decomposition, and the fundamental question of whether learned reward models can keep pace with increasingly capable policy models.