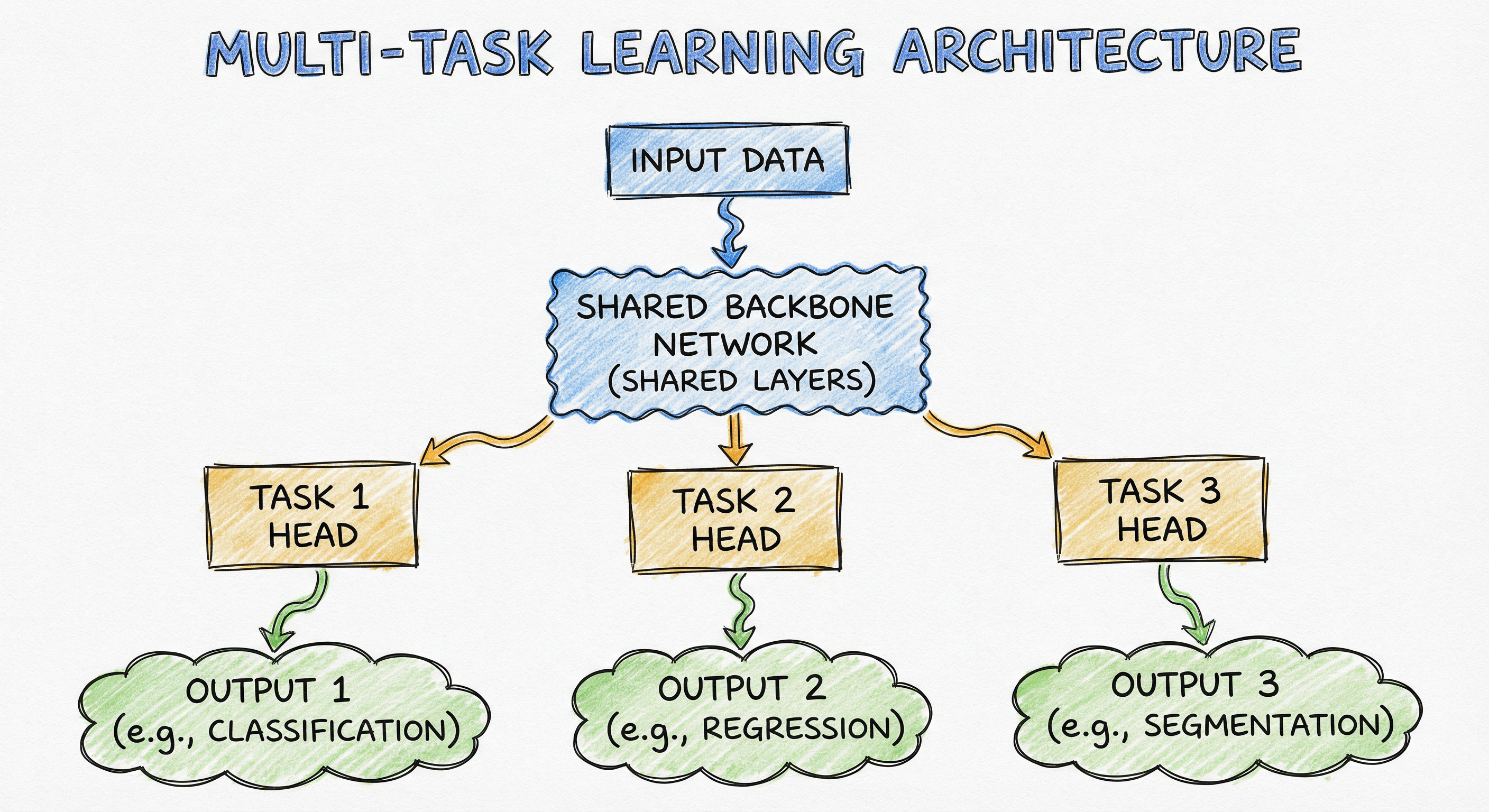
Multi-Task Learning in Machine Learning
Multi-Task Learning (MTL) is a training paradigm where a single model learns to solve multiple related tasks simultaneously by sharing representations across them. Instead of training N separate models for N tasks, you train one model that jointly optimizes all N objectives -- and the remarkable empirical finding is that this shared model often outperforms its single-task counterparts on every task.
The core insight is that related tasks contain complementary information. A model learning to predict delivery ETA at Swiggy, for example, benefits from simultaneously learning to predict restaurant preparation time, traffic congestion, and optimal routing -- these tasks share latent features that would be harder to extract in isolation. By learning them together, the model discovers richer, more generalizable representations.
MTL has powered some of the most impactful ML systems in production. Google's YouTube recommendation engine uses multi-task ranking to simultaneously optimize for engagement (clicks, watch time) and satisfaction (likes, shares). Tesla's Autopilot HydraNet runs 50+ vision tasks through a single shared backbone. T5 and mT5 demonstrated that framing all NLP problems as text-to-text tasks creates a universal multi-task architecture that achieves state-of-the-art results across dozens of benchmarks.
But MTL is not a free lunch. When tasks conflict -- when learning one task actively hurts performance on another -- you encounter negative transfer, one of the most pernicious challenges in deep learning. The art of multi-task learning lies in knowing which tasks to combine, how to balance their gradients, and when to accept that single-task training is the better choice.
Concept Snapshot
- What It Is
- A training paradigm that jointly optimizes a single model on multiple related tasks, leveraging shared representations to improve generalization and parameter efficiency across all tasks.
- Category
- Model Training
- Complexity
- Advanced
- Inputs / Outputs
- Inputs: a base model (or architecture specification) + multiple task-specific datasets with corresponding loss functions. Outputs: a single model capable of performing all tasks, with shared and task-specific parameters.
- System Placement
- Sits in the training stage of the ML pipeline, after data preparation and before model evaluation and deployment. Often used as a replacement for training separate single-task models.
- Also Known As
- MTL, Joint Learning, Multi-objective Learning, Shared Representation Learning, Joint Training
- Typical Users
- ML Engineers, Applied Scientists, Research Scientists, NLP Engineers, Computer Vision Engineers, Recommendation System Engineers
- Prerequisites
- Deep learning fundamentals (loss functions, backpropagation, optimization), Transfer learning concepts, Multi-objective optimization basics, PyTorch or TensorFlow model design, Understanding of encoder-decoder and shared-trunk architectures
- Key Terms
- hard parameter sharingsoft parameter sharingnegative transfertask weightingauxiliary tasksgradient conflictPareto optimalitymixture of expertstask relatedness
Why This Concept Exists
The Redundancy Problem
Consider an e-commerce platform like Flipkart that needs to solve multiple problems for every user session: predict click-through rate, estimate purchase probability, forecast delivery time, and detect fraud. The naive approach is to train four separate models, each with its own feature extraction pipeline, training infrastructure, and serving endpoint.
But these tasks are deeply related -- they all operate on the same user behavior signals, product embeddings, and contextual features. Each model independently learns to extract representations from the same raw data, wasting compute and storage. Worse, each model sees only its own supervision signal, missing the broader patterns visible when all signals are considered together.
Multi-task learning exists to eliminate this redundancy. One shared model, one feature extraction pipeline, one forward pass at serving time -- and often better accuracy than any of the individual models.
The Inductive Bias Argument
Rich Caruana's foundational 1997 paper gave the formal justification: MTL improves generalization by using the domain information contained in the training signals of related tasks as an inductive bias. When Task A and Task B share a common underlying structure, training on both tasks simultaneously prevents the model from overfitting to spurious patterns in either task alone.
Think of it as regularization through task diversity. Each task acts as a constraint on the shared representation -- the model must find features that work well across all tasks, not just features that overfit to one task's training set. This is particularly valuable when individual tasks have limited labeled data but the combined multi-task dataset is substantial.
From Theory to Production
The evolution of MTL mirrors the evolution of deep learning itself. In the 1990s, Caruana demonstrated MTL with shallow neural networks on medical diagnosis tasks. In the 2010s, deep MTL architectures like shared-trunk CNNs enabled joint object detection and segmentation in computer vision. In 2019, Google's YouTube team deployed Multi-gate Mixture-of-Experts (MMoE) for multi-objective video recommendation at billion-user scale.
The 2020s brought the text-to-text revolution. Google's T5 showed that framing every NLP task as text-to-text generation -- translation, summarization, classification, question answering -- creates a natural multi-task learner. Its multilingual variant mT5 extended this to 101 languages. Today, the instruction-tuning phase of LLMs like GPT-4 and Llama is fundamentally a multi-task learning process, simultaneously teaching the model to follow diverse instructions across hundreds of task categories.
Key Takeaway: MTL exists because related tasks share latent structure, and learning that structure jointly is more sample-efficient, computationally cheaper, and often more accurate than learning it independently.
Core Intuition & Mental Model
The Analogy: Cross-Training Athletes
Imagine a swimmer who also trains in running and cycling (a triathlete). Each sport develops different muscle groups, but they all build cardiovascular endurance, core strength, and mental resilience. A swimmer who cross-trains is not just a better triathlete -- they're often a better swimmer than someone who only trains in the pool, because the complementary exercises build a more robust athletic foundation.
Multi-task learning works the same way. Task A (say, sentiment classification) and Task B (say, named entity recognition) share a common foundation: understanding language syntax, semantics, and context. Training on both tasks simultaneously forces the model to develop richer language representations than either task alone would demand. The model becomes a better "language athlete" because it's been cross-trained.
Why Sharing Representations Helps
The deeper intuition involves what the shared layers actually learn. In a single-task model, the learned features are optimized to predict one target -- they may capture shortcuts or spurious correlations specific to that task's training distribution. In a multi-task model, the shared features must satisfy multiple objectives simultaneously. This constraint eliminates task-specific shortcuts and forces the model to learn features that capture the true underlying structure of the data.
For example, in a shared-trunk vision model that jointly predicts object boundaries and surface normals, the shared backbone learns to extract edge features that are useful for both tasks. These edge features are more robust and generalizable than features learned for either task alone, because they capture genuine visual structure rather than task-specific artifacts.
The Balancing Act
Here is where the intuition gets nuanced. Not all tasks help each other. If you train a model to simultaneously predict house prices and classify cat breeds, the tasks have no shared structure -- you will get negative transfer, where each task actively harms the other.
The fundamental question in MTL is: do these tasks share enough latent structure that joint training improves generalization, or are they so different that they compete for model capacity? The answer depends on task relatedness, data balance, and model architecture. Getting this right is the central challenge of multi-task learning.
Mental Model: Multi-task learning is collaborative study. Students studying related subjects together (physics and mathematics) reinforce each other's understanding. Students studying unrelated subjects together (physics and poetry) just distract each other.
Technical Foundations
The Multi-Task Objective
Given tasks with corresponding loss functions and datasets , the multi-task learning objective is:
where are shared parameters, are task-specific parameters, are task weights, and is the model's prediction for task .
Hard Parameter Sharing
In hard parameter sharing, all tasks share a common encoder and each task has its own head:
The gradient of the combined loss with respect to shared parameters is:
This is where gradient conflicts arise: if , tasks and push the shared parameters in opposing directions.
Soft Parameter Sharing
In soft parameter sharing, each task has its own encoder but they are regularized to stay close:
The cross-stitch network (Misra et al., 2016) generalizes this by learning linear combinations of activations across task-specific networks at each layer:
where are learnable cross-stitch parameters that determine how much task shares with task at layer .
Uncertainty-Based Task Weighting (Kendall et al., 2018)
The homoscedastic uncertainty approach treats task weights as learnable parameters derived from each task's observation noise:
where is the learned noise parameter for task . The term prevents the trivial solution of setting all . Tasks with higher uncertainty (larger ) receive lower weight, which is intuitive: noisy tasks should contribute less to the shared representation.
GradNorm (Chen et al., 2018)
GradNorm dynamically adjusts task weights to equalize the gradient norms across tasks. Define the gradient norm for task as:
GradNorm introduces a reference norm and an inverse training rate , then minimizes:
with respect to the weights . The hyperparameter controls the strength of the restoring force toward equal training rates.
Multi-gate Mixture-of-Experts (MMoE)
MMoE replaces the single shared trunk with expert networks and task-specific gating networks:
where is the gating function for task . Each task learns to select and combine experts differently, enabling flexible sharing without hard parameter tying.
Pareto Optimality
A solution is Pareto optimal if there is no other that improves any task loss without worsening another:
The set of all Pareto optimal solutions forms the Pareto front. Multi-task optimization methods like MGDA (Multiple Gradient Descent Algorithm) seek solutions on this front by finding a gradient direction that is a convex combination of task gradients with non-negative dot product with each task gradient.
Practical Rule: Start with hard parameter sharing and uniform task weights. If you see negative transfer on specific tasks, try uncertainty-based weighting or GradNorm. If tasks are fundamentally different in nature, consider MMoE for flexible expert allocation.
Internal Architecture
The architecture of a multi-task learning system varies significantly based on the degree and style of parameter sharing. The three dominant paradigms -- hard parameter sharing, soft parameter sharing, and mixture-of-experts -- represent a spectrum from maximum sharing to maximum flexibility.
In the most common configuration (hard parameter sharing), a shared encoder processes inputs into a common representation, which is then passed to task-specific heads. The shared encoder captures features useful across all tasks, while each head specializes in producing the output for its specific task. This is the architecture used by Tesla's HydraNet, where a single vision backbone feeds into 50+ task-specific heads for object detection, lane marking, depth estimation, and more.
The MMoE (Multi-gate Mixture-of-Experts) architecture offers a more flexible alternative. Instead of a single shared encoder, it uses multiple expert sub-networks, each learning different aspects of the input. Task-specific gating networks then learn which experts are most relevant for each task. This architecture, pioneered by Google for YouTube recommendations, handles diverse and partially-conflicting tasks gracefully.
Key Components
Shared Encoder / Backbone
The common feature extraction network shared across all tasks. In hard parameter sharing, this is the bottom portion of the network that processes raw inputs into intermediate representations. For vision tasks, this is typically a ResNet or ViT backbone; for NLP, a transformer encoder. The shared encoder captures general-purpose features that benefit all tasks.
Task-Specific Heads
Lightweight networks appended to the shared encoder, one per task. Each head specializes in mapping the shared representation to a task-specific output. For classification tasks, the head might be a simple linear layer; for dense prediction tasks (segmentation, depth), it could be a full decoder. Head complexity depends on the gap between the shared representation and the task output.
Expert Networks (MMoE)
In the mixture-of-experts architecture, multiple expert sub-networks replace the single shared encoder. Each expert processes the input independently and learns to capture different aspects of the data. The number of experts is a hyperparameter -- typically 4-16. More experts provide greater flexibility but increase compute and memory.
Gating Networks (MMoE)
Task-specific gating functions that learn which experts are relevant for each task. The output for task is a weighted combination of expert outputs: . Each task can allocate attention to different experts, allowing tasks with shared structure to use the same experts while dissimilar tasks use different ones.
Task Weighting Module
A component (sometimes implicit, sometimes learnable) that controls the relative contribution of each task loss to the total gradient. Options include fixed uniform weights, uncertainty-based weighting (Kendall et al.), GradNorm (dynamic gradient balancing), or manual tuning. The choice of weighting strategy significantly impacts whether MTL helps or hurts.
Task Sampler / Curriculum
Controls the order and frequency at which tasks are sampled during training. Strategies include round-robin (cycle through tasks), proportional sampling (sample proportional to dataset size), temperature-based sampling (adjust task frequency with a temperature parameter), and curriculum learning (start with easier tasks and gradually introduce harder ones). Critical for tasks with vastly different dataset sizes.
Gradient Surgery Module (Optional)
Methods like PCGrad (Yu et al., 2020) that detect and resolve gradient conflicts between tasks at each training step. When two task gradients point in opposing directions, gradient surgery projects each gradient onto the normal plane of the conflicting gradient, preserving the non-conflicting component. Adds computational overhead but effectively reduces negative transfer.
Data Flow
Training Path: Input data is sampled from one or more task datasets (depending on the sampling strategy). The input passes through the shared encoder (hard sharing) or expert networks (MMoE) to produce intermediate representations. These representations are routed to the appropriate task-specific head, which produces a prediction. The task loss is computed, weighted by the task weighting module, and gradients are propagated back through both the task head and the shared layers. If gradient surgery is enabled, conflicting gradients are projected before the shared parameter update.
Inference Path: For a given input, the shared encoder computes the intermediate representation once. Depending on the application, one or more task heads produce predictions in a single forward pass. This amortization is a key efficiency advantage -- N task predictions for the cost of one shared forward pass plus N lightweight head passes.
Multi-Task Serving Pattern: In production, the shared encoder often runs on GPU while task heads can be distributed across different services. This enables adding new tasks without re-deploying the shared encoder, and allows different tasks to have different latency budgets.
The diagram shows two architecture variants side by side. On the left, hard parameter sharing: an input flows through a single shared encoder, which branches into three task-specific heads (Task A, B, C). On the right, MMoE architecture: an input flows into three parallel expert networks (green), whose outputs are mixed by task-specific gating networks (orange) before passing to task heads.
How to Implement
Implementation Approaches
There are three levels at which you can implement multi-task learning:
Level 1: Shared Trunk with Multiple Heads -- The simplest approach. Share a backbone (pretrained or randomly initialized) and add task-specific heads. This is suitable for tasks with high relatedness and similar input modalities. Implementation takes 50-100 lines of PyTorch code.
Level 2: Advanced Architectures (MMoE, Cross-Stitch) -- When tasks are partially related or you want flexible sharing. Requires implementing gating networks or cross-stitch units. More complex but handles task conflicts better. Frameworks like LibMTL provide reference implementations.
Level 3: Text-to-Text MTL (T5-style) -- For NLP tasks, convert all tasks to a unified text-to-text format. The model architecture is a standard seq2seq transformer; multi-task learning is achieved purely through data mixing. This is the approach used by T5, mT5, and modern instruction-tuned LLMs.
Cost Note: Training a multi-task model on 3-5 tasks simultaneously typically costs 1.2-1.5x a single-task model (due to the shared backbone amortizing compute), compared to 3-5x for training separate single-task models. For a Flipkart-scale recommendation system with 5 objectives, that is the difference between ~INR 1.5 lakh (7,200) for five separate models per training run on cloud A100 instances.
import torch
import torch.nn as nn
from torch.utils.data import DataLoader
class MultiTaskModel(nn.Module):
"""Hard parameter sharing MTL model with shared encoder and task-specific heads."""
def __init__(self, input_dim: int, hidden_dim: int, task_configs: dict):
super().__init__()
# Shared encoder
self.shared_encoder = nn.Sequential(
nn.Linear(input_dim, hidden_dim),
nn.ReLU(),
nn.Dropout(0.1),
nn.Linear(hidden_dim, hidden_dim),
nn.ReLU(),
nn.Dropout(0.1),
)
# Task-specific heads
self.task_heads = nn.ModuleDict()
for task_name, config in task_configs.items():
self.task_heads[task_name] = nn.Sequential(
nn.Linear(hidden_dim, hidden_dim // 2),
nn.ReLU(),
nn.Linear(hidden_dim // 2, config["output_dim"]),
)
def forward(self, x: torch.Tensor, task_name: str = None):
shared_repr = self.shared_encoder(x)
if task_name:
return {task_name: self.task_heads[task_name](shared_repr)}
return {name: head(shared_repr) for name, head in self.task_heads.items()}
class UncertaintyWeightedLoss(nn.Module):
"""Kendall et al. 2018 -- learn task weights via homoscedastic uncertainty."""
def __init__(self, num_tasks: int):
super().__init__()
# log(sigma^2) for each task, initialized to 0 (sigma=1)
self.log_vars = nn.Parameter(torch.zeros(num_tasks))
def forward(self, losses: list[torch.Tensor]) -> torch.Tensor:
total_loss = 0
for i, loss in enumerate(losses):
precision = torch.exp(-self.log_vars[i]) # 1/sigma^2
total_loss += precision * loss + self.log_vars[i]
return total_loss
# Usage example
task_configs = {
"ctr_prediction": {"output_dim": 1, "loss_fn": nn.BCEWithLogitsLoss()},
"conversion_prediction": {"output_dim": 1, "loss_fn": nn.BCEWithLogitsLoss()},
"price_regression": {"output_dim": 1, "loss_fn": nn.MSELoss()},
}
model = MultiTaskModel(input_dim=256, hidden_dim=512, task_configs=task_configs)
mtl_loss = UncertaintyWeightedLoss(num_tasks=3)
optimizer = torch.optim.AdamW(
list(model.parameters()) + list(mtl_loss.parameters()), lr=1e-3
)
# Training loop
for batch in dataloader:
x, labels = batch["features"], batch["labels"]
outputs = model(x)
losses = []
for i, (task_name, config) in enumerate(task_configs.items()):
task_loss = config["loss_fn"](outputs[task_name], labels[task_name])
losses.append(task_loss)
total = mtl_loss(losses)
total.backward()
optimizer.step()
optimizer.zero_grad()This implementation demonstrates two key MTL components:
-
MultiTaskModel: A shared encoder feeds into task-specific heads via
nn.ModuleDict. The model can produce predictions for all tasks in one forward pass, or for a specific task iftask_nameis provided (useful for task-specific evaluation). -
UncertaintyWeightedLoss: Implements Kendall et al. (2018) uncertainty weighting. Instead of manually tuning task weights, the model learns for each task. The loss becomes . Tasks with higher uncertainty (noisier labels) automatically receive lower weight.
Note that the log_vars parameters are added to the optimizer -- this is critical because they are learnable parameters that must receive gradients.
import torch
import torch.nn as nn
import torch.nn.functional as F
class MMoELayer(nn.Module):
"""Multi-gate Mixture-of-Experts layer (Ma et al., KDD 2018)."""
def __init__(
self,
input_dim: int,
expert_dim: int,
num_experts: int,
num_tasks: int,
):
super().__init__()
self.num_experts = num_experts
self.num_tasks = num_tasks
# Expert networks
self.experts = nn.ModuleList([
nn.Sequential(
nn.Linear(input_dim, expert_dim),
nn.ReLU(),
nn.Linear(expert_dim, expert_dim),
nn.ReLU(),
)
for _ in range(num_experts)
])
# Task-specific gating networks
self.gates = nn.ModuleList([
nn.Linear(input_dim, num_experts)
for _ in range(num_tasks)
])
def forward(self, x: torch.Tensor) -> list[torch.Tensor]:
# Compute all expert outputs: (batch, num_experts, expert_dim)
expert_outputs = torch.stack([expert(x) for expert in self.experts], dim=1)
# Compute task-specific gated outputs
task_outputs = []
for gate in self.gates:
gate_weights = F.softmax(gate(x), dim=-1) # (batch, num_experts)
# Weighted sum of expert outputs
gated = torch.bmm(
gate_weights.unsqueeze(1), # (batch, 1, num_experts)
expert_outputs # (batch, num_experts, expert_dim)
).squeeze(1) # (batch, expert_dim)
task_outputs.append(gated)
return task_outputs
class MMoEModel(nn.Module):
"""Full MMoE model with task-specific towers."""
def __init__(
self,
input_dim: int,
expert_dim: int = 256,
num_experts: int = 8,
num_tasks: int = 3,
tower_hidden_dim: int = 128,
task_output_dims: list[int] = None,
):
super().__init__()
self.mmoe = MMoELayer(input_dim, expert_dim, num_experts, num_tasks)
# Task-specific towers
output_dims = task_output_dims or [1] * num_tasks
self.towers = nn.ModuleList([
nn.Sequential(
nn.Linear(expert_dim, tower_hidden_dim),
nn.ReLU(),
nn.Dropout(0.1),
nn.Linear(tower_hidden_dim, out_dim),
)
for out_dim in output_dims
])
def forward(self, x: torch.Tensor) -> list[torch.Tensor]:
mmoe_outputs = self.mmoe(x)
return [tower(h) for tower, h in zip(self.towers, mmoe_outputs)]
# Example: Recommendation system with 3 objectives
model = MMoEModel(
input_dim=512,
expert_dim=256,
num_experts=8,
num_tasks=3,
task_output_dims=[1, 1, 1], # CTR, CVR, watch time
)
x = torch.randn(32, 512) # batch of 32 user-item features
ctr_pred, cvr_pred, watch_time_pred = model(x)
print(f"CTR shape: {ctr_pred.shape}") # (32, 1)
print(f"CVR shape: {cvr_pred.shape}") # (32, 1)
print(f"Watch time shape: {watch_time_pred.shape}") # (32, 1)This implementation follows Google's MMoE architecture from their KDD 2018 paper. Key design decisions:
- num_experts=8: Each expert learns different input patterns. More experts provide more flexibility but increase parameter count linearly.
- Task-specific gates: Each task has its own gating network that learns a softmax distribution over experts. If two tasks are related, their gates may learn similar distributions; if tasks conflict, they will select different experts.
- Soft expert selection: Unlike top-k routing in sparse MoE (as in Mixtral), MMoE uses soft/dense gating where every expert contributes to every task with learned weights. This is simpler and more stable for small numbers of experts.
For production recommendation systems (like those at Flipkart, YouTube, or Swiggy), this architecture is typically extended with feature crossing layers, embedding tables for categorical features, and position bias correction towers.
from transformers import T5ForConditionalGeneration, T5Tokenizer, Trainer, TrainingArguments
from datasets import load_dataset, concatenate_datasets, DatasetDict
# Load model and tokenizer
model_name = "google/t5-base"
tokenizer = T5Tokenizer.from_pretrained(model_name)
model = T5ForConditionalGeneration.from_pretrained(model_name)
# Load multiple task datasets
sentiment = load_dataset("sst2", split="train[:5000]")
summarization = load_dataset("xsum", split="train[:5000]")
nli = load_dataset("multi_nli", split="train[:5000]")
def format_sentiment(example):
text = f"sentiment: {example['sentence']}"
label = "positive" if example["label"] == 1 else "negative"
return {"input_text": text, "target_text": label}
def format_summarization(example):
text = f"summarize: {example['document']}"
return {"input_text": text, "target_text": example["summary"]}
def format_nli(example):
label_map = {0: "entailment", 1: "neutral", 2: "contradiction"}
text = f"nli premise: {example['premise']} hypothesis: {example['hypothesis']}"
return {"input_text": text, "target_text": label_map.get(example["label"], "neutral")}
# Format and combine datasets
sentiment_formatted = sentiment.map(format_sentiment).select_columns(["input_text", "target_text"])
summarization_formatted = summarization.map(format_summarization).select_columns(["input_text", "target_text"])
nli_formatted = nli.map(format_nli).select_columns(["input_text", "target_text"])
combined = concatenate_datasets([sentiment_formatted, summarization_formatted, nli_formatted])
combined = combined.shuffle(seed=42)
def tokenize(examples):
model_inputs = tokenizer(
examples["input_text"], max_length=512, truncation=True, padding="max_length"
)
labels = tokenizer(
examples["target_text"], max_length=128, truncation=True, padding="max_length"
)
model_inputs["labels"] = labels["input_ids"]
return model_inputs
tokenized = combined.map(tokenize, batched=True, remove_columns=["input_text", "target_text"])
# Train
training_args = TrainingArguments(
output_dir="./t5-multitask",
num_train_epochs=3,
per_device_train_batch_size=8,
gradient_accumulation_steps=4,
learning_rate=3e-4,
warmup_ratio=0.06,
logging_steps=100,
save_strategy="epoch",
bf16=True,
)
trainer = Trainer(
model=model,
args=training_args,
train_dataset=tokenized,
tokenizer=tokenizer,
)
trainer.train()This implements the T5-style text-to-text multi-task paradigm. Key design choices:
- Task prefixes ("sentiment:", "summarize:", "nli"): The model learns to route inputs to the correct task behavior based on the prefix string. This is the simplest form of task conditioning -- no architectural changes needed.
- Dataset concatenation and shuffling: Tasks are mixed into a single training stream. The shuffle ensures the model sees a diverse mix of tasks in each batch, preventing catastrophic forgetting of earlier tasks.
- Temperature-based sampling: In practice, you should sample tasks with probabilities proportional to where is a temperature parameter. gives proportional sampling; higher gives more uniform sampling, preventing large datasets from dominating.
This approach is the foundation of modern instruction tuning. When you fine-tune Llama or Mistral on a mix of instruction datasets (code, math, chat, reasoning), you are doing T5-style multi-task learning.
# Multi-Task Learning configuration (YAML format)
model:
architecture: mmoe # or shared_trunk, cross_stitch
backbone: resnet50 # shared backbone
num_experts: 8 # only for mmoe
expert_dim: 256
tasks:
ctr_prediction:
head_type: binary_classification
loss: bce_with_logits
weight: auto # uncertainty weighting
dataset: click_logs
sampling_temperature: 1.0
conversion_prediction:
head_type: binary_classification
loss: bce_with_logits
weight: auto
dataset: purchase_logs
sampling_temperature: 2.0 # up-weight smaller dataset
price_regression:
head_type: regression
loss: mse
weight: auto
dataset: price_data
sampling_temperature: 1.5
training:
task_weighting: uncertainty # or uniform, gradnorm, pcgrad
gradient_surgery: false # enable PCGrad for conflicting tasks
epochs: 20
batch_size: 256
learning_rate: 1e-3
optimizer: adamw
scheduler: cosine_with_warmup
warmup_ratio: 0.05
gradient_clip_norm: 1.0
early_stopping:
monitor: avg_val_metric
patience: 5Common Implementation Mistakes
- ●
Using uniform task weights without monitoring per-task metrics: The default approach of summing task losses with equal weights often silently harms low-resource tasks. A task with 100K examples will dominate one with 5K examples. Always track per-task validation metrics and use uncertainty weighting or GradNorm if you see imbalance.
- ●
Sharing too many or too few layers: Sharing all layers up to the final projection is not always optimal. For tasks with different input distributions (e.g., text classification and image captioning on a multimodal model), sharing the entire backbone forces incompatible features into the same representation. Use probing experiments to find the right split point.
- ●
Ignoring task sampling strategy with imbalanced datasets: If Task A has 1M examples and Task B has 10K examples, naive epoch-based training means Task B is seen 100x less frequently. Use temperature-based sampling: sample proportional to with to up-weight small tasks.
- ●
Not evaluating single-task baselines: You cannot know if MTL is helping unless you compare against single-task models trained with the same compute budget. Many published MTL results look impressive until you control for total training compute -- sometimes the MTL model just saw more data.
- ●
Adding unrelated auxiliary tasks hoping they will help: MTL is not a magic regularizer. Adding a random task (e.g., language modeling) to a domain-specific task (e.g., medical NER) can hurt if the tasks compete for model capacity. Always validate task relatedness before committing to joint training.
- ●
Training all tasks for the same number of epochs: Different tasks converge at different rates. A simple classification task may converge in 2 epochs while a complex generation task needs 10. Use per-task early stopping or gradient accumulation schedules to prevent over-training fast tasks.
When Should You Use This?
Use When
You have multiple related tasks that share underlying features -- e.g., CTR prediction, conversion prediction, and revenue estimation in a recommendation system all benefit from shared user and item embeddings
Individual tasks have limited labeled data but the combined dataset is substantial -- MTL acts as a data augmentation mechanism by providing complementary supervision signals
You need to reduce inference cost by running multiple predictions in a single forward pass instead of maintaining N separate models with N separate serving endpoints
You want to improve generalization by using auxiliary tasks as regularizers -- e.g., predicting POS tags as an auxiliary task while training a named entity recognizer
Your production system has tight latency budgets and cannot afford sequential calls to multiple models -- a single MTL model can produce all predictions in one pass
You are building a unified model for a platform (like T5 for NLP or HydraNet for autonomous driving) where architectural simplicity and maintainability outweigh per-task optimization
Avoid When
Tasks are fundamentally unrelated -- training a sentiment classifier and an image segmentation model together will produce negative transfer and waste capacity
You have abundant labeled data for each task independently and per-task models already achieve strong performance -- MTL's regularization benefit diminishes with large datasets
Tasks have conflicting objectives that cannot be resolved architecturally -- e.g., maximizing click-through rate often conflicts with maximizing long-term user satisfaction, and naive MTL will underperform specialized solutions
You need maximum performance on a single critical task and are willing to dedicate full model capacity to it -- MTL always involves a capacity tradeoff where shared parameters must serve multiple masters
Your tasks have vastly different scales, modalities, or output formats that make architectural sharing impractical -- e.g., mixing a regression task with outputs in the millions and a binary classification task
Your team lacks the engineering maturity to debug multi-task training dynamics -- gradient conflicts, negative transfer, and task imbalance are subtle and hard to diagnose without proper monitoring
Key Tradeoffs
The Core Tradeoff: Sharing vs. Interference
The fundamental tension in MTL is between the benefits of shared representations and the cost of task interference. More sharing means more regularization and computational efficiency, but also more risk of negative transfer.
| Architecture | Sharing Level | Best For | Risk of Negative Transfer | Parameter Overhead |
|---|---|---|---|---|
| Shared Trunk | Maximum | Highly related tasks | High | Lowest (1x) |
| Cross-Stitch | Learned | Partially related tasks | Medium | ~2x per task pair |
| MMoE | Flexible | Diverse task mixtures | Low | ~Nx (N experts) |
| Separate Models | None | Unrelated tasks | None | Tx (T tasks) |
Compute vs. Quality
MTL's compute savings are significant but come at a quality tradeoff. Consider a 5-task recommendation system at Flipkart:
| Approach | Training Cost | Serving Latency | Avg Task Quality |
|---|---|---|---|
| 5 separate models | 5x base (~INR 6L / $7,200) | 5 sequential calls (50ms) | 100% (baseline) |
| Shared trunk MTL | 1.3x base (~INR 1.6L / $1,900) | 1 call (12ms) | 97-102% |
| MMoE MTL | 1.8x base (~INR 2.2L / $2,600) | 1 call (15ms) | 99-103% |
MTL often improves quality on data-scarce tasks while slightly degrading quality on data-rich tasks. The aggregate is usually positive, but you need to verify this for your specific task combination.
Operational Complexity
The hidden cost of MTL is operational. A single multi-task model is easier to deploy but harder to debug. When Task C's performance drops, is it because of a data quality issue in Task C's labels, or because Task A's gradient is interfering? With separate models, performance attribution is trivial. With MTL, you need gradient monitoring, per-task ablation, and careful experiment tracking.
Practitioner's Note: Start with the simplest approach that works. Train a shared-trunk model with uncertainty weighting. If specific tasks underperform, try MMoE or gradient surgery. Only fall back to separate models if MTL consistently underperforms after architectural tuning.
Alternatives & Comparisons
Knowledge distillation transfers knowledge from one model to another (teacher to student) rather than training on multiple objectives simultaneously. Use distillation when you want to compress a large model into a smaller one or when you have a strong single-task teacher. Use MTL when you want to jointly learn shared representations across tasks and improve sample efficiency.
Single-task full fine-tuning dedicates all model capacity to one task and typically achieves the best per-task performance when data is abundant. Choose single-task fine-tuning when you have large labeled datasets and a critical task where maximum quality matters. Choose MTL when you have multiple tasks with limited data or need to consolidate inference into a single model.
LoRA adapts a pretrained model to a single task with minimal parameter updates. Multiple LoRA adapters can be trained independently and swapped at inference time, offering a form of multi-task capability without joint training. Choose LoRA when tasks are independent and you want modular, hot-swappable specializations. Choose MTL when tasks benefit from shared learned representations.
Domain adaptation focuses on transferring a model from a source domain to a target domain, typically involving a single task across two data distributions. MTL involves multiple tasks, often within the same domain. Choose domain adaptation when the challenge is distributional shift; choose MTL when the challenge is learning multiple complementary objectives.
Continued pretraining extends a model's general knowledge by training on domain-specific unlabeled text, typically with a single objective (language modeling). MTL uses multiple supervised objectives simultaneously. Choose continued pretraining for domain knowledge injection; choose MTL for multi-objective optimization with labeled data.
Feature extraction uses a frozen pretrained model as a fixed feature extractor, training only task-specific heads on top. This is faster and simpler than MTL but does not update the shared representation. Choose feature extraction when the pretrained features are already well-suited to your tasks; choose MTL when you need the shared representation to adapt to your specific task combination.
Pros, Cons & Tradeoffs
Advantages
Improved generalization through implicit regularization: Each task acts as a constraint on the shared representation, preventing overfitting to task-specific noise. This is especially powerful when individual tasks have limited labeled data -- the model cannot memorize one task's training set because it must also perform well on others.
Reduced inference cost and latency: A single forward pass through the shared backbone produces representations for all tasks simultaneously. For a system like YouTube's recommendation ranker with 5+ objectives, this is the difference between 5 sequential model calls (~50ms) and 1 call (~10ms).
Better sample efficiency: Shared representations extract more information from each training example. A feature useful for Task A that would go unnoticed in single-task training may be amplified because Task B also benefits from it, effectively increasing the useful supervision signal per data point.
Lower infrastructure and maintenance cost: One model to train, version, deploy, and monitor is operationally simpler than N separate models. At Indian startups where MLOps headcount is limited, this consolidation is a significant practical advantage.
Auxiliary task bootstrapping: You can improve a primary task by adding cheap-to-label auxiliary tasks. For instance, improving a medical diagnosis model by adding symptom extraction as an auxiliary task -- the auxiliary labels are easy to collect and provide complementary supervision.
Richer learned representations: MTL models discover features that are broadly useful rather than narrowly task-specific. These representations transfer better to new downstream tasks, making the MTL model a stronger starting point for future fine-tuning.
Natural handling of label sparsity: In recommendation systems, some signals (clicks) are abundant while others (purchases) are rare. MTL allows the dense click signal to improve the representation used by the sparse purchase predictor.
Disadvantages
Negative transfer risk: When tasks conflict, jointly training them degrades performance on one or more tasks compared to single-task training. Detecting and diagnosing negative transfer requires careful per-task monitoring and ablation studies.
Complex hyperparameter tuning: Beyond standard training hyperparameters, MTL introduces task weights, sampling strategies, architecture choices (sharing depth, number of experts), and gradient surgery options. The search space grows combinatorially with the number of tasks.
Gradient conflict and optimization difficulty: When task gradients point in opposing directions, standard SGD oscillates or converges to a suboptimal compromise. Gradient surgery methods (PCGrad, CAGrad) add computational overhead and are not universally effective.
Debugging difficulty: When a task's performance drops in production, attributing the root cause is harder in MTL. Is it a data quality issue for that task, a gradient conflict with another task, or a distribution shift in the shared features? This ambiguity increases incident response time.
Task coupling in deployment: Updating one task's data or labels requires retraining the entire multi-task model, even if other tasks are unaffected. This coupling can slow iteration velocity compared to independently deployable single-task models.
Capacity allocation challenges: The shared representation has finite capacity. Adding more tasks without increasing model size forces tasks to compete for representation space. This can cause performance regression on existing tasks when new tasks are added -- a form of catastrophic interference.
Difficult to scale to many tasks: While MTL works well for 2-10 related tasks, scaling to 50+ tasks (as in T5-style instruction tuning) requires careful curriculum design, loss scaling, and often custom architectures. Naive scaling leads to performance degradation on tail tasks.
Failure Modes & Debugging
Negative Transfer from Unrelated Tasks
Cause
Including tasks that share little to no underlying structure with the primary task. For example, adding a language modeling auxiliary task to a tabular data classification problem, or combining image classification with audio transcription in a multi-modal MTL setup without proper architectural separation.
Symptoms
The primary task's validation metric is consistently 2-5% worse than a single-task baseline trained with the same compute budget. Training loss for the primary task converges more slowly than in single-task training. The shared representation becomes a compromise that serves no task well.
Mitigation
Always benchmark against single-task baselines before committing to MTL. Use task affinity scores (train each task pair and measure mutual benefit) to identify which tasks should be grouped together. Consider MMoE or separate expert groups for tasks with low affinity.
Dominant Task Gradient Suppression
Cause
One task with a much larger dataset or much higher loss magnitude dominates the shared parameter updates, effectively turning the MTL model into a single-task model for the dominant task. Common in recommendation systems where click data (billions) dwarfs purchase data (millions).
Symptoms
Dominant task achieves near-single-task performance while other tasks plateau well below their single-task baselines. Gradient norms for non-dominant tasks are 10-100x smaller than the dominant task. Learning curves for non-dominant tasks show initial improvement followed by stagnation or regression.
Mitigation
Implement GradNorm to dynamically equalize gradient norms across tasks. Use temperature-based task sampling to up-weight smaller tasks. Normalize losses to comparable scales before weighting. Consider task-specific learning rates for task heads.
Seesaw Effect Between Tasks
Cause
Two or more tasks with partially conflicting gradients cause performance to oscillate -- improving one task degrades another in alternating fashion. This is often caused by shared parameters being pulled in opposing directions by conflicting task objectives.
Symptoms
Per-task validation metrics oscillate out of phase: when Task A improves, Task B degrades, and vice versa. Training loss for individual tasks does not monotonically decrease. The average metric may look stable while individual tasks are highly unstable.
Mitigation
Apply gradient surgery (PCGrad) to project conflicting gradients. Switch from hard parameter sharing to MMoE so tasks can use different expert combinations. Reduce the sharing depth -- use earlier layers as the shared encoder and give each task a deeper task-specific trunk.
Catastrophic Forgetting During Sequential Task Addition
Cause
Adding a new task to an existing MTL model by continuing training on the new task's data without sufficient replay of existing tasks. The shared representation shifts to accommodate the new task, degrading performance on previously learned tasks.
Symptoms
Existing tasks show sudden performance drops when a new task is added. The new task's performance improves rapidly while older tasks regress. The effect is most severe when the new task has a large dataset that dominates training batches.
Mitigation
Always retrain with all tasks from scratch when adding new tasks. If incremental training is necessary, use experience replay -- mix old task data into each training batch. Freeze the shared encoder and only train the new task head as a lightweight alternative.
Loss Scale Incompatibility
Cause
Combining tasks with losses on vastly different numerical scales -- e.g., a cross-entropy classification loss (typical range 0.1-2.0) with a mean squared error regression loss (typical range 100-10,000). Without normalization, the high-magnitude loss dominates the gradient.
Symptoms
Regression tasks (or any task with high loss magnitude) show strong improvement while classification tasks stagnate. Gradient norms are heavily imbalanced even with equal task weights. Learning rate tuning seems to only help one group of tasks at the expense of others.
Mitigation
Normalize all task losses to comparable scales before combining. Use uncertainty-based weighting (Kendall et al.) which inherently handles scale differences through learned noise parameters. Alternatively, use relative loss scaling where each task's loss is divided by its initial (random model) value.
Task Contamination in Text-to-Text MTL
Cause
In T5-style text-to-text multi-task learning, the model confuses task boundaries -- generating a summary when asked to classify sentiment, or producing a translation in the wrong language. This occurs when task prefixes are ambiguous, training data is insufficiently shuffled, or the model does not learn strong task conditioning.
Symptoms
Output format errors -- the model produces outputs in the wrong format for the requested task. Evaluation metrics show high variance across runs. The model sometimes partially completes one task then switches to another mid-output.
Mitigation
Use clear, distinct task prefixes that are unambiguous (e.g., "classify sentiment: " not just "sentiment: "). Ensure thorough shuffling of the combined dataset. Increase the proportion of examples from tasks that show contamination. Use task-specific decoding constraints during inference.
Placement in an ML System
Where MTL Fits in the ML System
Multi-task learning occupies the training stage of the ML pipeline, replacing the standard single-task training loop with a multi-objective optimization process. The workflow is:
- Data preparation: Multiple task datasets are collected, cleaned, and formatted. Each task has its own label schema and evaluation metric. Data pipeline must support multi-task sampling.
- Architecture design: Choose the sharing strategy (shared trunk, MMoE, cross-stitch) based on task relatedness analysis. Define task-specific heads.
- Multi-task training: Joint optimization with task weighting, gradient management, and curriculum scheduling. Monitor per-task metrics throughout.
- Evaluation: Each task is evaluated independently on its own test set, AND aggregate metrics are computed. Critical to compare against single-task baselines.
- Deployment: The model is deployed as a single serving endpoint that can produce predictions for any or all tasks in one forward pass.
In Indian tech companies like Flipkart and Swiggy, MTL models power core product features -- recommendation ranking, ETA prediction, fraud detection -- where multiple business objectives must be optimized simultaneously within strict latency budgets. The operational advantage of a single model serving multiple objectives is particularly valuable in these high-traffic, latency-sensitive environments.
Multi-Objective Serving Pattern: The MTL model is deployed behind a single inference endpoint. The API accepts task flags indicating which predictions are needed. The shared encoder runs once, and only the requested task heads are executed. This pattern reduces serving costs by 3-5x compared to separate models while meeting p99 latency requirements.
Pipeline Stage
Training / Fine-tuning
Upstream
- Data Preprocessing Pipeline (cleaned, labeled datasets for each task)
- Base Model Selection (pretrained backbone or architecture)
- Task Definition and Label Schema Design
Downstream
- Model Evaluation (per-task and aggregate metrics)
- Model Registry and Versioning
- Model Serving (multi-head inference endpoint)
Scaling Bottlenecks
The primary training bottleneck is memory scaling with the number of tasks. Each task head, its optimizer states, and its batch of data must fit in memory simultaneously. For an MMoE model with 8 experts and 10 tasks, the parameter count can be 3-5x a single-task model, pushing memory requirements to multiple GPUs.
The second bottleneck is task sampling and data pipeline throughput. When tasks have wildly different dataset sizes (millions vs. thousands), the data loader must implement sophisticated sampling strategies without becoming a training speed bottleneck. At scale, this requires custom data pipeline engineering.
At serving time, the bottleneck is head selection overhead. If only a subset of tasks is needed per request (common in recommendation systems), computing all task heads wastes compute. Conditional computation (only running the requested heads) requires careful engineering to avoid dynamic graph overhead.
For systems with many tasks (50+), the gradient computation itself becomes a bottleneck. Computing gradients for all tasks at every step is expensive; techniques like task sampling (computing gradients for a random subset of tasks per step) trade gradient accuracy for throughput.
Production Case Studies
Google's YouTube team deployed a multi-task ranking system using Multi-gate Mixture-of-Experts (MMoE) to simultaneously optimize for engagement objectives (clicks, watch time) and satisfaction objectives (likes, dismissals). The system extends the Wide & Deep architecture with MMoE for flexible expert sharing and includes a shallow tower to correct for position bias in training data.
The multi-task system improved both engagement and satisfaction metrics simultaneously, which had previously been conflicting objectives in single-task models. The MMoE architecture allowed each objective to select different expert combinations, resolving the conflict. Deployed at scale to billions of users.
Tesla's Autopilot uses a HydraNet architecture -- a single shared vision backbone that feeds into 50+ task-specific heads for object detection, lane marking, depth estimation, traffic sign recognition, and drivable area segmentation. All tasks share a single RegNet or EfficientNet backbone, and task-specific decoders are trained and fine-tuned independently while keeping the shared backbone frozen or jointly trained.
Running 50+ vision tasks through a single shared backbone reduced inference cost by approximately 10x compared to running separate models. The shared representation learned richer visual features than any single-task model, and the HydraNet architecture enabled Tesla to compile a full Autopilot build in real-time on their FSD computer.
Google's T5 (Text-to-Text Transfer Transformer) demonstrated that framing all NLP tasks as text-to-text generation creates a natural multi-task learning framework. T5 was pretrained on C4 and then multi-task fine-tuned on a mixture of supervised tasks including translation, summarization, classification, and question answering. The text-to-text format eliminated the need for task-specific architectures -- the same model handles all tasks through different text prefixes.
T5-11B achieved state-of-the-art results on 18 out of 24 NLP benchmarks in 2020. The multi-task pretraining strategy (mixing unsupervised and supervised objectives) outperformed both pure unsupervised pretraining and pure multi-task supervised training. The multilingual variant mT5 extended this to 101 languages.
Swiggy's ETA prediction system uses a multi-stage multi-task architecture that jointly predicts four components of delivery time: Order-to-Assignment (O2A), First Mile (restaurant to delivery partner), Wait Time (food preparation), and Last Mile (delivery to customer). These tasks share underlying signals like traffic conditions, restaurant load, and delivery partner location. The system evolved from gradient boosted trees to neural networks to capture cross-task interactions.
The multi-task neural network architecture improved ETA accuracy by reducing prediction error compared to the previous approach of independent models for each stage. The shared feature extraction across stages enabled the model to capture dependencies that independent models missed -- for example, high restaurant stress simultaneously affects wait time and first mile pickup time.
Tooling & Ecosystem
A comprehensive PyTorch library for multi-task learning that implements 14+ MTL methods including GradNorm, PCGrad, MGDA, CAGrad, Nash-MTL, and uncertainty weighting. Provides a unified interface for comparing different MTL architectures (shared trunk, MMoE, cross-stitch) and optimization strategies. Excellent for research and benchmarking.
Hugging Face Transformers provides pretrained T5 and mT5 models that serve as strong baselines for text-to-text multi-task learning. The library handles tokenization, model loading, and training via the Trainer API, making it straightforward to set up multi-task NLP training by mixing datasets with task prefixes.
The dominant deep learning framework for implementing custom MTL architectures. PyTorch's nn.ModuleDict and nn.ModuleList make it natural to build multi-head models with shared trunks. Autograd handles gradient computation across multiple loss functions, and torch.nn.utils.clip_grad_norm_ helps manage gradient explosion in multi-task settings.
A TensorFlow/Keras implementation of the MMoE architecture from the original Google KDD 2018 paper. Provides reference implementations of the multi-gate mixture-of-experts layer, gating networks, and task-specific towers. Useful as a starting point for recommendation system MTL in TensorFlow ecosystems.
Official implementation of Projecting Conflicting Gradients (PCGrad) for multi-task learning. Detects conflicting gradients between tasks and projects them to remove the conflicting component. Can be applied as a drop-in optimizer wrapper to any existing MTL training loop.
A curated and regularly updated list of MTL datasets, codebases, and papers maintained by Tsinghua University's Machine Learning group. Covers methods from 2016 to 2024, organized by optimization strategies, architectures, and application domains. The best starting point for a comprehensive literature survey.
Research & References
Kendall, Gal & Cipolla (2018)CVPR 2018
Introduced homoscedastic uncertainty-based task weighting, where the model learns per-task noise parameters and weighs losses as . Demonstrated on simultaneous depth regression, semantic segmentation, and instance segmentation, outperforming hand-tuned weights.
Chen, Badrinarayanan, Lee & Rabinovich (2018)ICML 2018
Proposed dynamically adjusting task weights to equalize gradient norms across tasks, using a reference norm and inverse training rate to balance learning speeds. Replaced exponential grid search over task weights with a single hyperparameter , achieving better results with dramatically less tuning.
Ma, Zhao, Yi, Chen, Hong & Chi (2018)KDD 2018
Introduced MMoE, which replaces a shared bottom layer with multiple expert networks and task-specific gating. Showed that MMoE handles task relationships more gracefully than hard parameter sharing, especially when tasks have low correlation. Validated on Google's content recommendation system at scale.
Raffel, Shazeer, Roberts, Lee, Narang, Matena, Zhou, Li & Liu (2020)JMLR 2020
Introduced T5, demonstrating that framing all NLP tasks as text-to-text generation enables effective multi-task learning across diverse tasks (translation, summarization, QA, classification). The multi-task mixing strategy during pre-training and fine-tuning produced state-of-the-art results on 18/24 benchmarks.
Yu, Kumar, Gupta, Levine, Hausman & Finn (2020)NeurIPS 2020
Introduced PCGrad, which detects conflicting gradients between tasks (negative cosine similarity) and projects each task's gradient onto the normal plane of the other. Showed significant improvements in multi-task RL, scene understanding, and NLP tasks. The method is model-agnostic and can be combined with any MTL architecture.
Lin, Zhen, Li, Zhang & Kwong (2019)NeurIPS 2019
Formalized multi-task learning as Pareto optimization and proposed an algorithm to explore the Pareto front of task trade-offs. Enables practitioners to choose their preferred operating point on the Pareto front after training, rather than committing to a single trade-off before training.
Ruder (2017)arXiv preprint
A widely cited survey that covers hard and soft parameter sharing, motivations for MTL from machine learning and representation learning perspectives, and mechanisms explaining why MTL works (implicit data augmentation, attention focusing, eavesdropping, regularization). Essential reading for anyone entering the MTL field.
Misra, Shrivastava, Gupta & Hebert (2016)CVPR 2016
Introduced cross-stitch units that learn linear combinations of activations from task-specific networks, enabling the model to discover the optimal balance between shared and private representations. A principled approach to soft parameter sharing that avoids hard architectural decisions about which layers to share.
Interview & Evaluation Perspective
Common Interview Questions
- ●
Explain multi-task learning. What are the main architectural approaches?
- ●
What is negative transfer and how do you detect and mitigate it?
- ●
How do you decide which tasks to train together in a multi-task model?
- ●
Compare hard parameter sharing and MMoE. When would you choose each?
- ●
How would you balance task losses in a multi-task recommendation system?
- ●
What is the Pareto front in multi-task optimization and why does it matter?
- ●
How does T5's text-to-text approach handle multi-task learning?
- ●
Design a multi-task model for a food delivery platform that predicts ETA, fraud, and recommendation relevance.
Key Points to Mention
- ●
MTL works because related tasks share latent structure, and joint training finds representations that generalize better than single-task training. The key mechanism is implicit regularization -- each task constrains the shared representation, preventing overfitting to any single task's noise.
- ●
Hard parameter sharing (shared encoder + task heads) is the simplest and works well for highly related tasks. MMoE (multiple experts + task-specific gating) is better when tasks are partially related or conflict. Know when to use each.
- ●
Task weighting is critical. Uniform weights are rarely optimal. Uncertainty weighting (Kendall et al., 2018) learns weights automatically based on task noise. GradNorm (Chen et al., 2018) equalizes gradient norms. PCGrad (Yu et al., 2020) resolves gradient conflicts.
- ●
Negative transfer occurs when tasks compete for model capacity or have conflicting gradients. Diagnose it by comparing per-task MTL performance against single-task baselines. Mitigate with MMoE, gradient surgery, or by removing the conflicting task.
- ●
T5 showed that the text-to-text format creates a universal multi-task architecture for NLP. Task prefixes route the model to the correct behavior. This paradigm is the foundation of modern instruction tuning.
- ●
Real-world cost savings: an MTL model for 5 tasks costs ~1.5x a single model (INR 1.8L / 7,200). Inference latency drops from 5 sequential calls (~50ms) to 1 call (~12ms).
Pitfalls to Avoid
- ●
Claiming MTL always improves performance -- it does not. Negative transfer is real and common. The honest answer is 'MTL helps when tasks share structure and hurts when they don't, and determining this requires empirical validation.'
- ●
Describing only hard parameter sharing and ignoring MMoE, cross-stitch, or gradient surgery. Senior candidates should demonstrate awareness of the full architectural spectrum.
- ●
Ignoring the operational aspects: task sampling, loss balancing, per-task monitoring, and the coupling cost of retraining all tasks when one changes. These practical concerns distinguish senior engineers from textbook answers.
- ●
Confusing multi-task learning with multi-label classification. MTL involves learning multiple distinct objectives with potentially different loss functions and output formats. Multi-label is a single task with multiple binary labels.
- ●
Not discussing when to use separate models instead. A mature engineer knows that sometimes independent single-task models with a feature store are simpler, more debuggable, and perform better than MTL.
Senior-Level Expectation
A senior/staff engineer should discuss MTL at three levels: (1) Theoretical: articulate hard vs. soft parameter sharing, gradient conflict analysis, Pareto optimality, and the conditions under which MTL improves generalization (task relatedness, data scarcity, shared latent structure). (2) Architectural: compare shared trunk, MMoE, cross-stitch, and T5-style approaches with concrete tradeoffs. Discuss task weighting (uncertainty, GradNorm) and gradient surgery (PCGrad). (3) System Design: design a multi-task serving architecture for a concrete use case (e.g., Swiggy ETA + fraud + recommendation), including task sampling strategy, per-task monitoring, incremental task addition, and fallback to single-task models when negative transfer is detected. The ability to reason about when MTL is the wrong choice -- and to propose simpler alternatives -- demonstrates the judgment expected at senior levels.
Summary
What We Covered
Multi-Task Learning (MTL) is a training paradigm that jointly optimizes a single model on multiple related tasks by sharing representations across them. The core architectures range from hard parameter sharing (shared encoder + task-specific heads) to soft parameter sharing (cross-stitch networks) to mixture-of-experts (MMoE with task-specific gating). The choice depends on task relatedness: highly related tasks benefit from maximum sharing, while diverse or conflicting tasks need flexible expert allocation.
The critical challenge in MTL is managing task interference. Uniform loss weighting rarely works -- tasks with different scales, dataset sizes, or learning speeds require adaptive balancing. Uncertainty weighting (Kendall et al., 2018) learns per-task noise parameters to automatically down-weight noisy tasks. GradNorm (Chen et al., 2018) equalizes gradient norms across tasks. PCGrad (Yu et al., 2020) directly resolves gradient conflicts by projecting opposing gradients. When these methods fail, negative transfer indicates that the tasks should not be trained together, and separate models or reduced sharing (MMoE) should be used instead.
MTL powers some of the largest-scale ML systems in production: Google YouTube's multi-objective ranking (MMoE), Tesla's Autopilot HydraNet (50+ vision tasks), Google T5/mT5 (unified text-to-text NLP), and recommendation systems at companies like Flipkart and Swiggy. The practical benefits are substantial -- 2-3x training cost reduction, 4-5x serving cost reduction, and lower latency from amortized inference. For Indian tech companies operating under tight compute budgets, MTL is often the difference between maintaining five separate models (INR 6L/year) and one unified model (INR 1.5L/year). The key to success is empirical validation: always compare against single-task baselines, monitor per-task metrics, and be willing to remove tasks that cause negative transfer.